В настоящее время для управления РЛС и обработки радиолокационной информации широкое применение находит цифровая обработка, в том числе и создание цифровых АРУ (ЦАРУ). ЦАРУ имеет ряд преимуществ перед аналоговыми. Это в первую очередь:
· Независимость длительности процесса установления требуемого усиления от уровня входного сигнала;
· Независимость регулировочных характеристик от разброса параметров и конкретных форм АРУ и свойств регулируемого каскада;
· Возможность установления требуемого усиления после приема первого импульса от сопровождаемой цели;
· Сохранение установленного усиления при перерывах в приеме сигнала.
Один из вариантов импульсной АРУ можно представить следующей функциональной схемой.
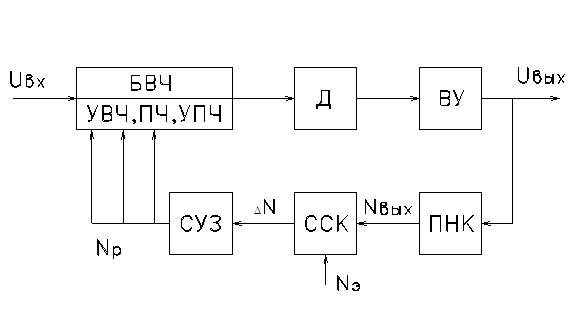
Выходное напряжение видеоусилителя преобразуется в двоичный код с помощью преобразователя напряжение – код. Код выходного напряжения Nвых сравнивается с эталонным кодом Nэ в схеме сравнения кодов, образуя код рассогласования ∆N. ССК выполняет роль порогового устройства, а эталонный код аналог напряжения задержки. В результате поразрядного усреднения в схеме усреднения и запоминания (СУЗ) формируется код регулирования, который управляет регулируемыми элементами с дискретной двоичной регулировкой. В представленной схеме регулируемыми элементами являются каскады УПЧ с дискретной регулировкой.
Вариантом аналоговой схемы АРУ импульсных приемников является следующая.
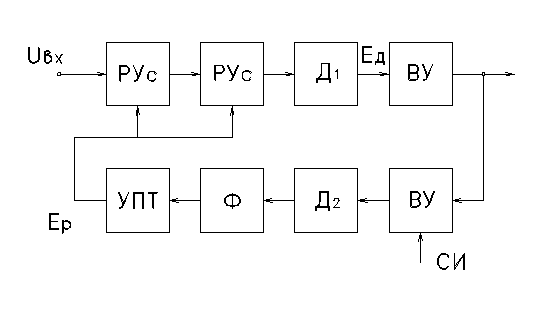
В данной схеме импульсный сигнал детектируется дважды, вначале детектором радиоимпульсов Д1, а затем пиковым детектором Д2. В интервалах между импульсами полезного сигнала могут возникать помехи, в этом случае АРУ действует на все сигналы, включая помехи. Для устранения этого явлений цепь АРУ подключают только на время действия полезного сигнала, т.е. используют стробирование, когда видеоусилитель открывается стробирующим импульсом. Этот импульс формируется передатчиком РЛС.
В радиолокационных системах в ряде случаев появляется необходимость применения программной АРУ. В первую очередь эта ситуация возникает, когда на вход приемника поступают сигналы различных амплитуд, отраженные от объектов расположенных на различных дальностях. Если усиление радиотракта выбрано исходя из обеспечения приема относительно слабых сигналов, то импульсы отраженные от ближних объектов и имеющие большую амплитуду вызывают перегрузку тракта приемника. При выборе усиления по сильному сигналу будет затруднен прием слабых сигналов. В этом случае целесообразно изменять коэффициент усиления по определенной программе. В РЛС сопровождения, где координаты объекта определяются методом равносигнальной зоны, система АРУ не должна реагировать на полезную амплитуднаю модуляцию радиоимпульсов и управляется только средним значением отраженных сигналов, зависящих от дальности цели. В этом случае постоянная времени системы АРУ должна быть значительно больше периода развертки луча антенны. Другими словами регулировка усиления должна быть инерционна.
Выделение полезных сигналов из всего многообразия принимаемых антенной осуществляется с помощью специального селекторного каскада, которым может быть УПЧ или видеоусилитель. Большую часть времени селекторный каскад заперт и открывается лишь пред приходом сигнала, отраженным от сопровождаемой цели с помощью селекторного импульса.
Схема радиолокационного приемника с инерционной АРУ может быть представлен в следующем виде.
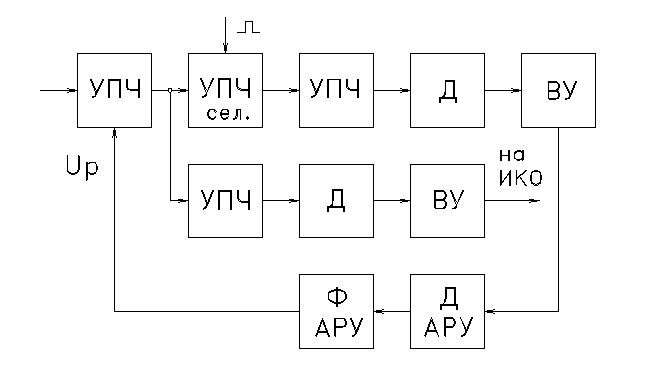
В канал дальности и затем на индикатор кругового объема поступают все сигналы с нестробируемых УПЧ и на индикаторе отражается воздушная обстановка. На детектор же АРУ поступают сигналы от определенной цели и после детектирования детектором с большой постоянной времени преобразуются в постоянное напряжение, поступающее на регулируемые УПЧ. По мере уменьшения расстояния до цели растет амплитуда отраженных сигналов, но под действием системы АРУ коэффициент усиления регулируемых каскадов уменьшается, сохраняя примерно постоянной амплитуду сигналов от выбранной цели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.