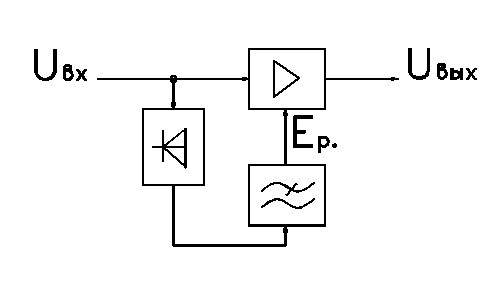
Структурная схема прямой простой АРУ включает те же элементы.
Функциональная схема комбинированной АРУ включает следующие элементы.
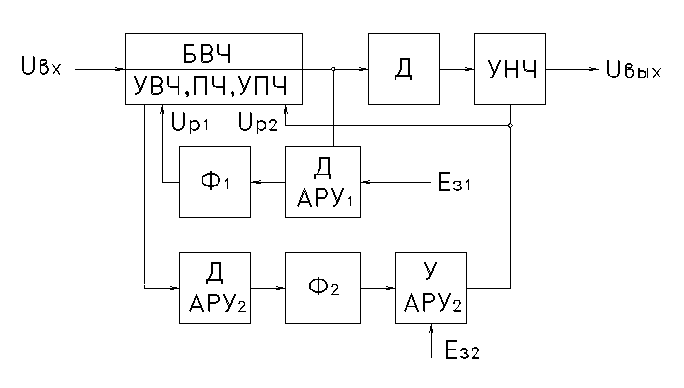
Обратная система АРУ образована детектором ДАРУ1, фильтром Ф1 и всеми каскадами основного тракта, расположенными между точкой ввода регулирующего напряжения Uρ1 и выходом блока высокой частоты (БВЧ).
В прямую схему АРУ входят детектор ДАРУ2, фильтр Ф2 и усилитель постоянного напряжения У АРУ2. Регулирующее напряжение Uρ2 вводится в БВЧ и УНЧ, который может и отсутствовать. Фильтры Ф1 и Ф2 придают цепям АРУ необходимую инерционность, обусловленную как устойчивость АРУ1, так и отсутствием демодуляции амплитудно модулированных сигналов в АРУ1 и АРУ2.
Роль фильтров могут играть цепи нагрузки детекторов. Регулирующие напряжения Uρ1 и Uρ2, не содержащие составляющих с частотой полезного сигнала, содержат составляющие изменяющиеся с частотами паразитной амплитудной модуляции входного сигнала. Полезная информация беспрепятственно проходит через основной тракт приемника, выделяется детектором и усиливается УНЧ, образуя выходное напряжение.
Нет необходимости снижать усиление слабых сигналов (Uвх < Uвх мин), не обеспечивающих номинального выходного напряжения при максимальном усилении всех каскадов. Для придания цепям АРУ пороговых свойств они запираются принудительным смещением и отпираются тогда, когда напряжение входного сигнала превысит напряжение запирания. Как правило напряжения запирания (задержки) подаются на детекторы или усилители (На схеме E31 и E32).
Задержка может вводиться по среднему значению сигнала или по максимальному. В цепи АРУ1 нет специального усилителя и она является не усиленной системой. АРУ2 система усиленная, она обладает большей глубиной регулирования и способна обеспечивать меньший динамический диапазон выходного сигнала.
При слабом сигнале на входе приемника и максимальном коэффициенте усиления на его выходе прослушиваются шумы, создаваемые внешними помехами и собственными шумами приемника. Для устранения этого дефекта используются бесшумные системы АРУ.
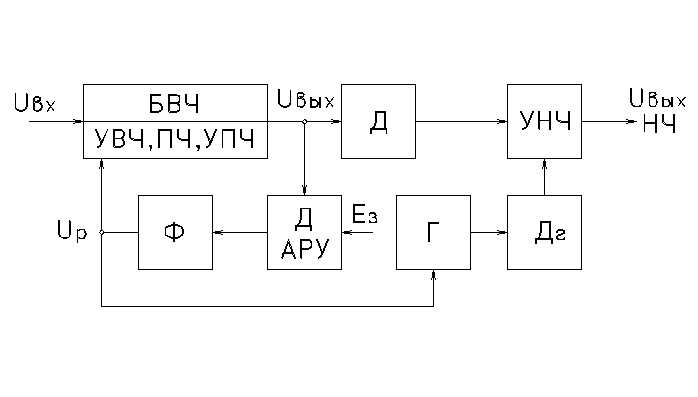
Автогенератор генерирует колебания высокой частоты, находящейся вне пределов полосы пропускания УНЧ. Колебания детектируются, а выпрямленное напряжение запирает один из каскадов УНЧ.
При условии когда входное напряжение БВЧ больше напряжения запирания Uвых> E3 замыкается система АРУ и начинает поступать регулирующее напряжение Uρ, которое кроме блока высокой частоты подается на генератор срывая его колебания. В результате открывается запертый каскад УНЧ.
В обзорных РЛС уровень внешних шумов может сильно изменяться с изменением направления антенны. Для выравнивания уровня выходных шумов приемника используется «АРУ по шумам» (ШАРУ). Регулирующее напряжение в этом случае вырабатывается в результате детектирования шумов. Быстродействие системы должно быть согласованно с периодом обзора, чтобы ШАРУ успевала отрабатывать изменения уровня шумового фона. Кроме того для уменьшения маскировки на экране локатора отметок от целей интенсивными отражениями от земной поверхности и местных предметов и нормализации отметок от целей с одинаковой эффективной отражающей поверхностью, расположенных на различных расстояниях от РЛС применяют временную регулировку усиления ВАРУ.
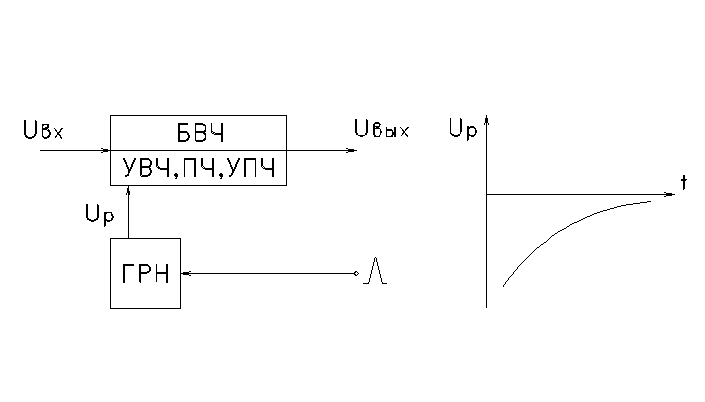
Пусковой импульс от модулятора РЛС, формируемый одновременно с зондирующим, запускает генератор регулирующего напряжения. В начальный период напряжение Uρ может даже запирать приемник, а затем по мере уменьшения его усиление растет, доходя до максимума. Таким образом усиление связывается с дальностью. Форма и скорость изменения Uρ устанавливается в зависимости от конкретных условий. Такая система регулировки усиления является автономной, не связанной с интенсивностью входного сигнала в каждый момент времени.
По степени быстродействия различают АРУ инерционные и быстродействующие (БАРУ). Степень быстродействия определяется относительно скорости изменения интенсивности сигнала. При высоком быстродействии системы не удается получить большую глубину регулирования без ухудшения устойчивости. Для устранения этого недостатка применяют несколько последовательных петель БАРУ, при этом одна петля охватывает один усилительный каскад.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.