37. Объемные пневмодвигатели вращательного движения
37.1. Общие сведения и конструктивные разновидности
Объемные пневмодвигатели вращательного движения или пневмомоторы предназначены для преобразования энергии сжатого воздуха во вращательное движение выходного вала.
В зависимости от возможности получения вращения выходного звена вала в обе стороны или в одну моторы бывают реверсивные и нереверсивные.
По виду рабочего элемента пневмомоторы разделяют на шестеренные, пластинчатые, поршневые, мембранные, винтовые. Принцип их действия тот же, что и соответствующих типов гидромоторов, однако характеристики существенно отличаются, что обусловлено в основном сжимаемостью рабочей среды (воздуха)
Поршневые пневмомоторы распространены в гидросистемах погрузочных машин, лебедок, локомотивов, молотков в горной промышленности, шестеренные пневмомоторы – в гидросистемах комбайнов и конвейеров, пластинчатые гидромоторы – в сверлильных станках, приводах насосов и пр. Пластинчатые пневмомоторы допускают работу при частоте вращения до 10000 об/мин, что позволяет применять их в ручных дрелях и высокооборотных шлифовальных машинах.
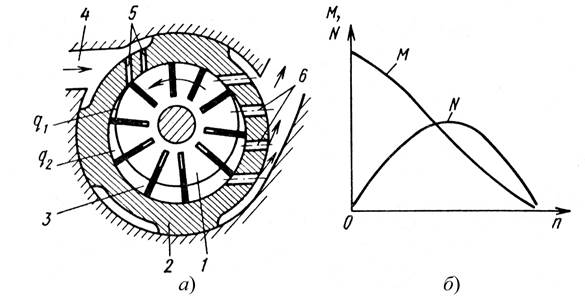
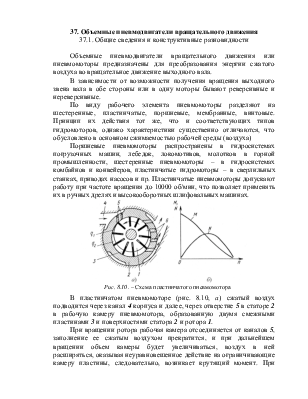
Рис. 8.10. – Схема пластинчатого пневмомотора
В пластинчатом пневмомоторе (рис. 8.10, а) сжатый воздух подводится через канал 4 корпуса и далее, через отверстие 5 в статоре 2 в рабочую камеру пневмомотора, образованную двумя смежными пластинами 3 и поверхностями статора 2 и ротора 1.
При вращении ротора рабочая камера отсоединяется от каналов 5, заполнение ее сжатым воздухом прекратится, и при дальнейшем вращении объем камеры будет увеличиваться, воздух в ней расширяться, оказывая неуравновешенное действие на ограничивающие камеру пластины, следовательно, возникает крутящий момент. При соединении камеры, заполненной расширившимся воздухом, с каналами 6 статора воздух удаляется в атмосферу.
Регулирование скорости этого пневмомотора осуществляется поворотом его статора 2 относительно оси симметрии корпуса; при этом изменяется продолжительность соединения рабочих камер с окном питания, а следовательно, и степень наполнения камер сжатым воздухом.
На рис. 8.10, б приведена зависимость крутящего момента М и мощности N на валу пластинчатого пневмомотора от частоты вращения его вала. Максимальная скорость имеет место при нулевом крутящем моменте (при отсутствии нагрузки), с увеличением которого она снижается. Пневмомотор допускает возможность неограниченной по времени перегрузки до полной остановки ротора без применения каких- либо защитных устройств.
Скорость вращения ротора обычно регулируется изменением расхода сжатого воздуха с помощью дросселя, включаемого обычно во входную магистраль, а величина крутящего момента – изменением давления, осуществляемым при помощи регулятора давления.
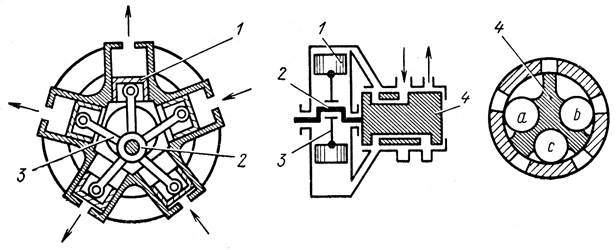
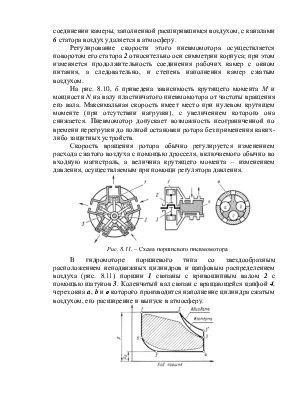
Рис. 8.11. – Схема поршневого пневмомотора
В гидромоторе поршневого типа со звездообразным расположением неподвижных цилиндров и цапфовым распределением воздуха (рис. 8.11) поршни 1 связаны с кривошипным валом 2 с помощью шатунов 3. Коленчатый вал связан с вращающейся цапфой 4, через окна a, b и с которого производится наполнение цилиндра сжатым воздухом, его расширение и выпуск в атмосферу.
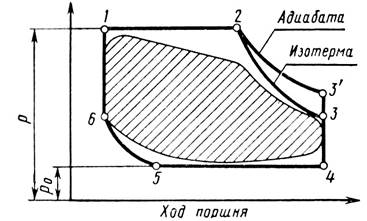
Рис. 8.12. – Расчетная индикаторная диаграмма пневмодвигателя
На рис. 8.12 приведена теоретическая индикаторная диаграмма пневмодвигателя. Наполнение цилиндра сжатым воздухом под давлением р происходит на участке 1–2 кривой; в точке 2 происходит отсоединение окна питания и на участке 2–3 – расширение воздуха; в точке 3 цилиндр соединяется с атмосферой и давление мгновенно понижается до атмосферного (до давления выпуска р0); на участке 4–5 происходит выталкивание отработавшего воздуха; в точке 5 происходит отсоединение цилиндра от выпускного окна и далее, на участке 5–6 – сжатие оставшегося в цилиндре воздуха; в точке 6 цилиндр соединяется с нагнетательной магистралью и давление в нем мгновенно повышается до р (точка 1), после чего процесс повторяется.
Расширение воздуха после отсоединения теоретически может происходить как при адиабатном изменении состояния газа (кривая 2–3), так и при изотермическом (кривая 2–3'). Фактический процесс будет протекать по политропе, которая расположится между кривыми 2–3 и 2–3'.
Фактическая индикаторная диаграмма (заштрихованное поле) будет отличаться от теоретической. Поскольку при движении поршня объем цилиндра увеличивается, давление в нем падает; в равной мере начало и конец «сброса» давления будут растянуты; выталкивание происходит при давлении выше атмосферного р0.
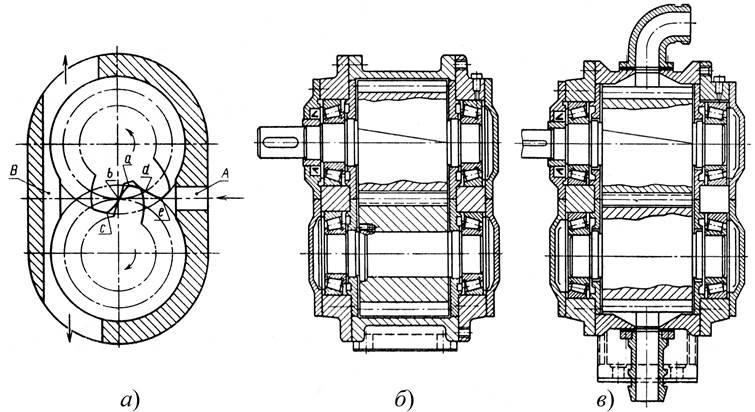
Рис. 8.13. – Шестеренный пневмомотор: а) конструктивная схема; б) нереверсивный; в) реверсивный
По способу зацепления зубьев шестеренные моторы подразделяются на моторы с наружным зацеплением, с внутренним зацеплением и промежуточным серповидным элементом, с внутренним зацеплением без промежуточного элемента (героторные). Моторы последних двух типов встречаются крайне редко.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.