Обнинский Государственный Технический Университет Атомной Энергетики.
ФИЗИКО-ЭНЕРГЕТИЧЕСКИЙ ФАКУЛЬТЕТ.
Кафедра общей и специальной физики.
Лабораторная работа № 5.
«Изучение колебаний связанных маятников».
Выполнил: Евстигнеев Е. Ю.
Проверил: Вишератин К. Н.
Обнинск 2003
Теория.
Два математических маятника, связанные между собой пружиной, являются простейшим примером связанной системы.
Как известно, для математического маятника уравнение моментов имеет вид
 (1)
(1)
где ![]() - момент силы тяжести;
- момент силы тяжести; ![]() - моменты остальных сил.
- моменты остальных сил.
В случае связанных маятников на
каждый из них будет действовать со стороны пружины дополнительная сила ![]() , которая при небольших отклонениях может
быть рассчитана как
, которая при небольших отклонениях может
быть рассчитана как
![]() ,
(2)
,
(2)
где l1- расстояние от точки подвеса до точки закрепления пружины,
k- коэффициент жёсткости пружины,
![]() и
и
![]() - углы отклонения первого и второго
маятников соответственно.
- углы отклонения первого и второго
маятников соответственно.
Эта сила создаёт дополнительный
момент ![]() . Ограничиваясь рассмотрением простейшего
случая, когда оба маятника имеют одинаковую длину l, а
точки закрепления пружин находятся на одинаковом расстоянии l1
от оси подвеса, из (1) в проекции на ось, перпендикулярную плоскости чертежа,
получим для первого и второго маятников соответственно
. Ограничиваясь рассмотрением простейшего
случая, когда оба маятника имеют одинаковую длину l, а
точки закрепления пружин находятся на одинаковом расстоянии l1
от оси подвеса, из (1) в проекции на ось, перпендикулярную плоскости чертежа,
получим для первого и второго маятников соответственно
![]() (3)
(3)
![]() (4)
(4)
где
учтено что ![]() ; I=
; I=![]() ;
; ![]() .
.
Преобразовав (3) и (4), получаем
 (5)
(5)
 (6)
(6)
Обозначим ![]() ,
,
![]() .
.
Складывая и вычитая (5) и (6), получим
![]() (7)
(7)
![]() (8)
(8)
где  - первая нормальная частота;
(9)
- первая нормальная частота;
(9)
 - вторая нормальная частота. (10)
- вторая нормальная частота. (10)
Решения уравнений (7) и (8) имеют вид
![]() (11)
(11)
![]() (12)
(12)
Для углов отклонения получаем
![]() (13)
(13)
![]() (14)
(14)
Выполнение работы.
Упражнение №1. Определение частот нормальных и парциальных колебаний системы из двух одинаковых маятников.
1. Устанавливаю обоймы, крепящие пружины, в верхней части стержней маятников, а грузы – в нижней части (для обоих маятников на одинаковом расстоянии)
2. Отсоединяю систему от обоймы, соединяющей маятник со стержнем электромотора.
3. Нажимаю кнопку СЕТЬ.
4. Отклоняю маятники сначала в
одну (![]() ), затем в противоположные (
), затем в противоположные (![]() ) стороны на угол ~ 6˚ и отпускаю их.
) стороны на угол ~ 6˚ и отпускаю их.
5. Провожу замеры времени 10 периодов колебаний. Данные записываю в Табл. №1.
Так же в таблицу №1 вношу
некоторые рассчитанные величины (t1п ср, t2п ср, ![]() t1п,
t1п,
![]() t2п,
t2п, ![]() ,
, ![]() , k, где
, k, где ![]() )
)
Таблица №1.
|
Длинна, см |
№ |
Время |
t1п ср |
t2п ср |
|
|
|
|
k |
|
|
t1п |
t2п |
|||||||||
|
l1= 10 |
1 |
12,079 |
12,044 |
5.2 |
5.224 |
|||||
|
2 |
12,089 |
12,021 |
||||||||
|
3 |
12,072 |
12,011 |
||||||||
|
4 |
12,078 |
12,032 |
||||||||
|
5 |
12,072 |
12,038 |
||||||||
|
l2= 15 |
1 |
12,035 |
11,671 |
5.22 |
5.382 |
|||||
|
2 |
12,034 |
11,673 |
||||||||
|
3 |
12,039 |
11,676 |
||||||||
|
4 |
12,036 |
11,674 |
||||||||
|
5 |
12,037 |
11,675 |
||||||||
|
l3=20 |
1 |
12,032 |
9,471 |
5.224 |
6.636 |
|||||
|
2 |
12,026 |
9,465 |
||||||||
|
3 |
12,027 |
9,467 |
||||||||
|
4 |
12,028 |
9,470 |
||||||||
|
5 |
12,030 |
9,468 |
||||||||
|
l4=25 |
1 |
12,053 |
6,800 |
5.21 |
9.243 |
|||||
|
2 |
12,056 |
6,791 |
||||||||
|
3 |
12,058 |
6,798 |
||||||||
|
4 |
12,054 |
6,803 |
||||||||
|
5 |
12,057 |
6,801 |
||||||||
|
l5=30 |
1 |
12,085 |
4,545 |
5.2 |
13.737 |
|||||
|
2 |
12,079 |
4,551 |
||||||||
|
3 |
12,080 |
4,532 |
||||||||
|
4 |
12,083 |
4,533 |
||||||||
|
5 |
12,084 |
4,561 |
||||||||
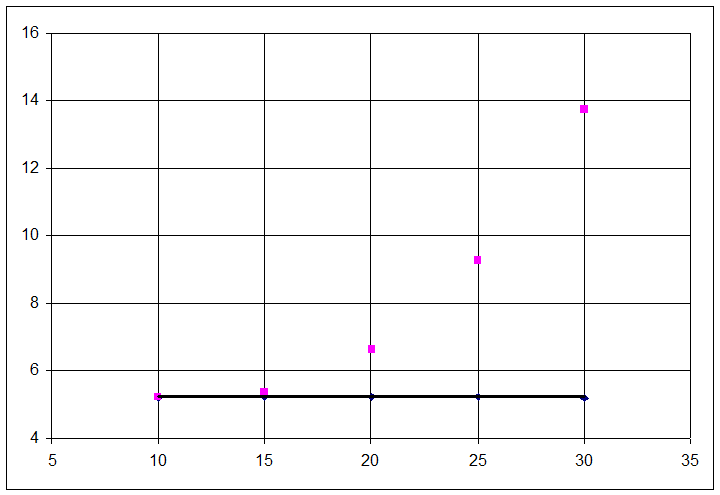
6. Строю график зависимостей ![]() (l1),
(l1), ![]() (l1).
(l1).
Упражнение №2. Изучение резонанса в системе связанных маятников.
Изменяя обороты двигателя и выжидая установления колебаний, провожу измерение амплитуды колебаний второго маятника по шкале.
Данные заношу в таблицу №2.
Таблица №2.
|
Частоты двигателя, причём |
|||||
|
|
|
|
|||
|
t1 |
t2 |
t3 |
|||
|
13.147 |
11.067 |
10.688 |
|||
|
13.137 |
11.070 |
10.685 |
|||
|
13.141 |
11.074 |
10.689 |
|||
|
13.144 |
11.078 |
10.686 |
|||
|
13.139 |
11.080 |
10.687 |
|||
|
tср |
|||||
|
13,141 |
11,074 |
10,687 |
|||
|
|
|
|
|
||
|
0,657 |
4,78 |
5,674 |
4,78 |
5,674 |
5,88 |
При дальнейшем увеличении оборотов двигателя наблюдал резкое увеличение амплитуды колебаний и их частоты. Данное явление называется резонансом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.