






















































были введены датчики положения роторов, информация от которых передавалась в компьютер, где в реальном масштабе времени рассчитывались текущие значения управляющих сигналов.
Динамика одномерного движения указанного вибрационного стенда моделировалась на компьютере в программной среде MATLAB, причем исследовался режим кратной синхронизации при традиционном управлении с помощью постоянных по величине управляющих моментах М1=2Н·м, М2=1Н·м. Модель динамики движения стенда вдоль вертикальной оси имеет вид:
 (1.1)
(1.1)
где: φ1,φ2 - углы вращения роторов, измеряемые от нижнего вертикального положения; y - вертикальная координата центра платформы; mпл,m1,m2 - массы платформы и роторов соответственно; J1 ,J2 - моменты инерции роторов; ρ1, ρ2 - эксцентриситеты роторов; с0 -жесткость пружин, g – ускорение свободного падения; kc-коэффициент трения в подшипниках; β-коэффициент сопротивления линейного демпфирующего элемента; M1, М2 –управляющие моменты электрических двигателей; m0=mпл+ 2m.
Как видно из уравнения (1.1) модель динамики вибрационной системы является существенно нелинейной и взаимосвязанной, что затрудняет управление такой системой.
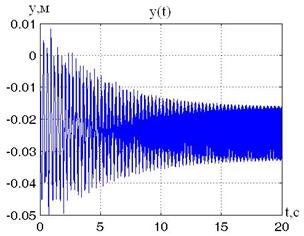
Графики
изменения вертикальной координаты платформы y, м (а);
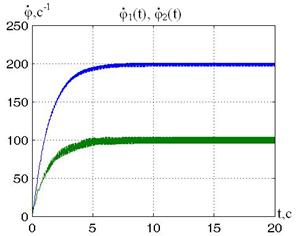
скоростей роторов ![]() (в) и приведенного сдвига фаз
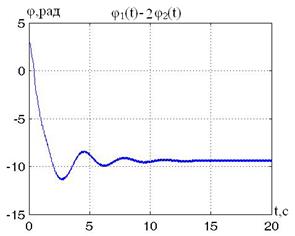
(в) и приведенного сдвига фаз ![]() (б) представлены на рис. 1.1.
(б) представлены на рис. 1.1.
Из
рисунка видно, что для скоростей имеет место приближенное равенство ![]() и приведенный сдвиг фаз
и приведенный сдвиг фаз ![]() приблизительно равен -3π.
приблизительно равен -3π.
Условия на массоинерционные параметры двухроторной системы совершающей колебания вдоль оси, при котором возможен эффект двукратной самосинхронизации, были получены в работе Н.П. Ярошевича [19] и имеют следующий вид:
![]() , (1.2)
, (1.2)
где ![]() , где m1, m2 – массы роторов; mпл – масса платформы; ρ1, ρ2
– эксцентриситеты роторов; J1 – момент инерции первого ротора; g – ускорение свободного падения; МД1,
М Д2 – вращающие моменты электродвигателей; МС1, М
С2 – моменты сил сопротивления вращению.
, где m1, m2 – массы роторов; mпл – масса платформы; ρ1, ρ2
– эксцентриситеты роторов; J1 – момент инерции первого ротора; g – ускорение свободного падения; МД1,
М Д2 – вращающие моменты электродвигателей; МС1, М
С2 – моменты сил сопротивления вращению.
|
а) |
|
|
б) |
в) |
Рис. 1.1.
Предположим, что МСi пропорциональны скоростям вращения роторов:
![]() ,
,
где кс – коэффициент вязкого трения в подшипнике.
Для стенда СВ-1 значения параметров следующие: m1=m2=1,5кг; mпл =9кг; ρ1= ρ2= 0,04м; J1=0,014кг·м2; кс=0,01; МД1=2Н·м; М Д2=1Н·м.
Очевидно, что условия
(1.2) выполняются. При этом имеет место приближенная двукратная частотная и
координатная синхронизация ![]() (
(![]() )(рис.1.2 а)). В то же время, при
присоединении к несущей платформе дополнительного груза (mг=1кг) кратная самосинхронизация нарушается:
приведенный сдвиг фаз
)(рис.1.2 а)). В то же время, при
присоединении к несущей платформе дополнительного груза (mг=1кг) кратная самосинхронизация нарушается:
приведенный сдвиг фаз ![]() (рис.1.2 б)). Как показано ниже
отсутствие кратной самосинхронизации так же имеет место при учете упругости
карданных валов, соединяющих двигатель с неуравновешенным ротором (рис.1.2.
в)). На рис. 1.2 показаны результаты моделирования при рассмотрении возможности
(рис.1.2 б)). Как показано ниже
отсутствие кратной самосинхронизации так же имеет место при учете упругости
карданных валов, соединяющих двигатель с неуравновешенным ротором (рис.1.2.
в)). На рис. 1.2 показаны результаты моделирования при рассмотрении возможности
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.