Исследовать структуру машинного агрегата, включающего привод и исполнительное устройство. Найти угловую скорость кривошипа.
Данные для расчета.
Привод № 1; исполнительный механизм №3; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Решение.
1. Изображаем кинематическую схему машинного агрегата, соответствующую заданию, нумеруем звенья и обозначаем кинематические пары.
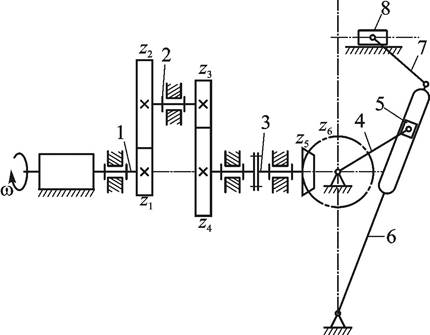
Рис. 1
Звеном является тело или система тел, имеющие одинаковый закон движения.
Вал электродвигателя вместе с посаженным на него зубчатым
колесом с числом зубьев ![]() образует одно звено 1.
образует одно звено 1.
Звено 2 состоит из жестко насаженных на общий вал двух
зубчатых колес с числами зубьев ![]() и
и ![]() .
.
Звено 3 состоит из двух валов, жестко связанных между собой
муфтой, на которые насажены зубчатые колеса с числами зубьев ![]() и
и ![]() .
.
Звено 4 включает в себя вал с жестко насаженным коническим
колесом с числом зубьев ![]() и кривошипом, являющимся начальным звеном
исполнительного механизма.
и кривошипом, являющимся начальным звеном
исполнительного механизма.
Звено 5 – поршень кулисы.
Звено 6 – кулиса.
Звено 7 – шатун.
Звено 8 – ползун (тело, имеющее поступательное движение).
0 - стойка.
Кинематические пары 5 класса:
0-1, 0-2, 0-3, 0-4, 0-6, 0-8, 4-5, 5-6, 5-7, 7-8.
Кинематические пары 4 класса:
1-2, 2-3, 3-4.
Согласно формуле Чебышева степень свободы плоского механизма
![]()
где – ![]() - количество подвижных звеньев;
- количество подвижных звеньев; ![]() ;
;
![]() – количество кинематических пар 5 класса;
– количество кинематических пар 5 класса; ![]() ;
;
![]() – количество кинематических пар 4 класса;
– количество кинематических пар 4 класса; ![]() .
.
![]()
Таким образом, машинный агрегат является механизмом с одной степенью свободы.
Определим угловую скорость кривошипа ![]()
где ![]() - передаточное отношение привода, которое
определяется произведением передаточных отношений зубчатых зацеплений.
- передаточное отношение привода, которое
определяется произведением передаточных отношений зубчатых зацеплений.
![]()
![]() – число пар внешнего
зацепления (
– число пар внешнего
зацепления (![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
;

Знак минус указывает, что 1 и 4 звенья имеют противоположное направление вращения.
Для указанной кинематической схемы шарнирного механизма
определить функцию положения ![]() выходного звена. Для заданных значений
параметров определить положение ведомого звена.
выходного звена. Для заданных значений
параметров определить положение ведомого звена.
Данные для расчета.
Схема №3, ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Решение.
Строим кинематическую схему
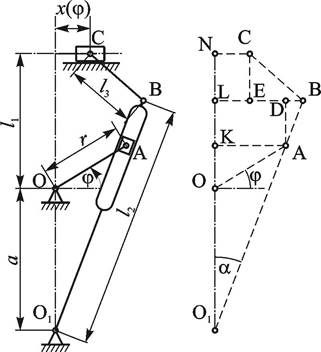
Рис. 4
Найдем взаимосвязь отрезков, показанных на рис 1, от угла ![]()
Треугольник ![]()
![]()
![]()
Треугольник ![]()


![]()
Определим положение ведомого звена при ![]()
Для данного угла расстояние ![]() будет откладываться влево от вертикальной
прямой
будет откладываться влево от вертикальной
прямой ![]() , а расстояние
, а расстояние ![]() будет увеличивать отрицательность
будет увеличивать отрицательность ![]()
![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

