Санкт-Петербургский государственный университет информационных технологий, механики и оптики
Кафедра систем управления и информатики
Расчетно-исследовательская работа
«Синтез наблюдателей Люенбергера и Калмана
Выполнил: Васильев В. И.
Группа: 5147
Преподаватель: Коровьяков А. Н.
Санкт-Петербург
2007
Дана модель гипотетического самолета с параметрами:
|
Этап I |
Этап II |
|||||
|
|
|
|
|
|
|
|
|
2.4 |
3.4 |
1.2 |
19 |
1.2 |
2.4 |
0.6 |
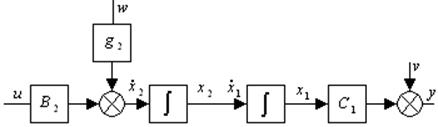
1. Синтез наблюдающего устройства Люенбергера.
Структурная схема модели гипотетического самолета:

 ,
,  ,
, ![]()
Полином Баттерворта 2-го порядка с tп=2.9с
Проверка системы на наблюдаемость:
Система полностью наблюдаема.
Синтез устройства оценки полной размерности:
Уравнение движения устройства оценки полной размерности:
Оценка параметра экспоненциальной устойчивости процесса наблюдения по норме вектора ошибки оценивания.
Система относительно вектора ошибки оценивания (вектора невязки) имеет вид:
![]()
Модель ошибок наблюдения:
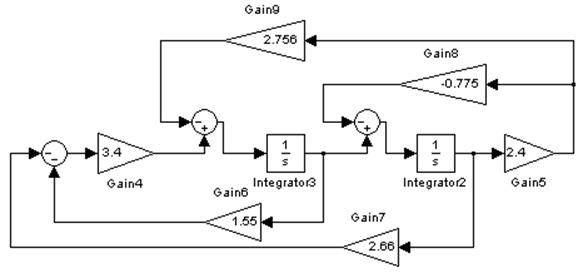
График ![]() :
:
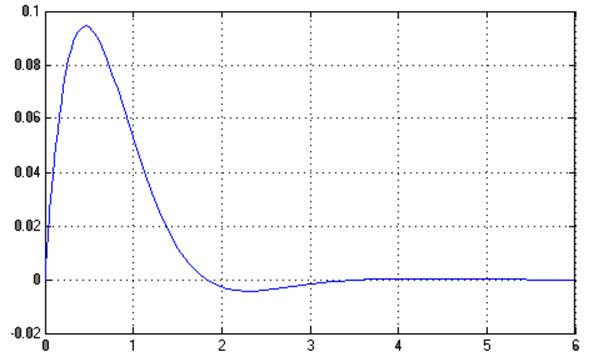
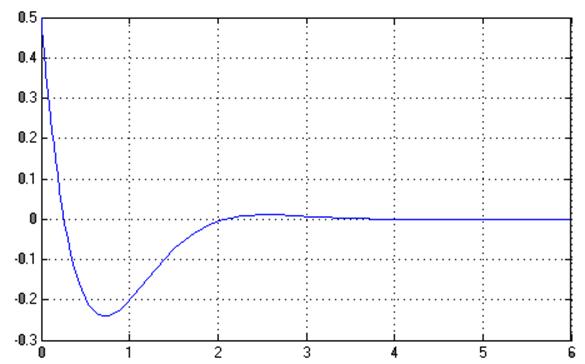
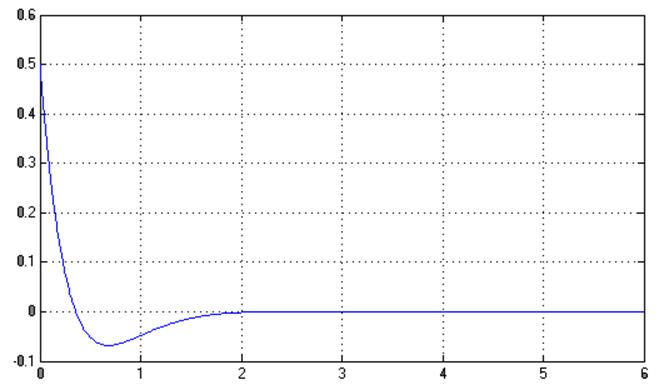
График ![]() :
:
Решение ищется как ![]()
Характеристический полином матрицы ![]() :
: ![]()
Найдем степень устойчивости системы: ![]()
![]()
![]()
Если собственные числа матрицы ![]() удовлетворяют
условию
удовлетворяют
условию ![]() , то найдется матрица
, то найдется матрица ![]() такая, что для любых t>0
такая, что для любых t>0 ![]() . Данное свойство
устанавливает экспоненциальную устойчивость системы с параметром α, который
определяет скорость затухания процессов. Параметр зависит от расположения
собственных чисел
. Данное свойство
устанавливает экспоненциальную устойчивость системы с параметром α, который
определяет скорость затухания процессов. Параметр зависит от расположения
собственных чисел ![]() на комплексной плоскости и
выбирается меньшим, чем степень устойчивости, т.е.
на комплексной плоскости и
выбирается меньшим, чем степень устойчивости, т.е. ![]() .
.
Таким образом, получаем параметр экспоненциальной
устойчивости процесса наблюдения по норме вектора ошибки оценивания: ![]()
Свойства синтезированного наблюдателя.
Задача наблюдения – это задача синтеза алгоритма, обеспечивающего оценивание переменных состояния объекта, которые невозможно непосредственно измерить. В данной работе такими переменными являются координата положения и скорость самолета.
Наблюдатель Люенбергера обеспечивает восстановление этих переменных состояния из измеренных входных и выходных переменных. Оценка вектора состояния – это вектор-функция, которая с течением времени стремится к оцениваемому значению вектора состояния. Вектор невязки при этом должен стремиться к нулю.
2. Синтез наблюдателя (фильтра) Калмана.
Структурная схема модели гипотетического самолета:
, ,
![]() ,
, 
Полином Баттерворта 2-го порядка с tп=2.9с
Проверка системы на наблюдаемость:
Система полностью наблюдаема.
Синтез устройства оценки полной размерности:

Уравнение движения устройства оценки полной размерности:
Оценка параметра экспоненциальной устойчивости процесса наблюдения по норме вектора ошибки оценивания.
Система относительно вектора ошибки оценивания (вектора невязки) имеет вид:
![]()
Модель ошибок наблюдения:
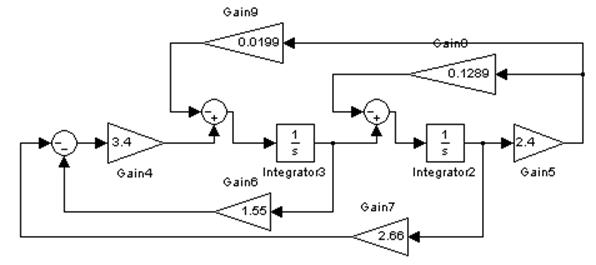
График ![]() :
:
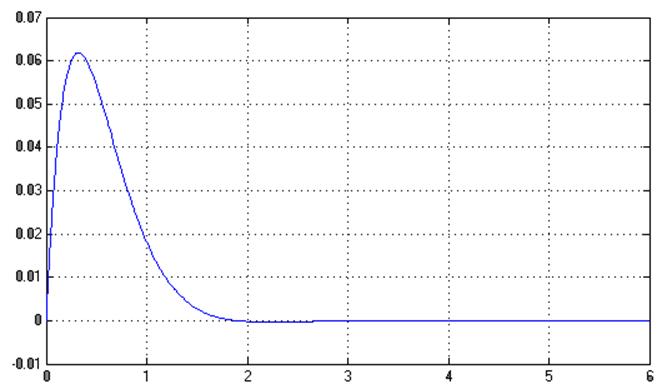
График ![]() :
:
Решение ищется как ![]()
Характеристический полином матрицы ![]() :
: ![]()
Найдем степень устойчивости системы: ![]()
![]()
![]()
Если собственные числа матрицы ![]() удовлетворяют
условию
удовлетворяют
условию ![]() , то найдется матрица
, то найдется матрица ![]() такая, что для любых t>0
такая, что для любых t>0 ![]() . Данное свойство
устанавливает экспоненциальную устойчивость системы с параметром α, который
определяет скорость затухания процессов. Параметр зависит от расположения
собственных чисел
. Данное свойство
устанавливает экспоненциальную устойчивость системы с параметром α, который
определяет скорость затухания процессов. Параметр зависит от расположения
собственных чисел ![]() на комплексной плоскости и
выбирается меньшим, чем степень устойчивости, т.е.
на комплексной плоскости и
выбирается меньшим, чем степень устойчивости, т.е. ![]() .
.
Таким образом, получаем параметр экспоненциальной
устойчивости процесса наблюдения по норме вектора ошибки оценивания: ![]() .
.
Свойства синтезированного наблюдателя.
Наблюдатель Калмана обладает такими же свойствами, как наблюдатель Люенбергера, за исключением того, что он работает в условиях действия случайных возмущений на входе и выходе объекта (фильтрует возмущения).
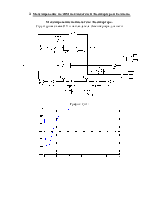
3. Моделирование на ЭВМ наблюдателей Люенбергера и Калмана.
Моделирование наблюдателя Люенбергера.
Структурная схема ОУ и наблюдателя Люенбергера для него:
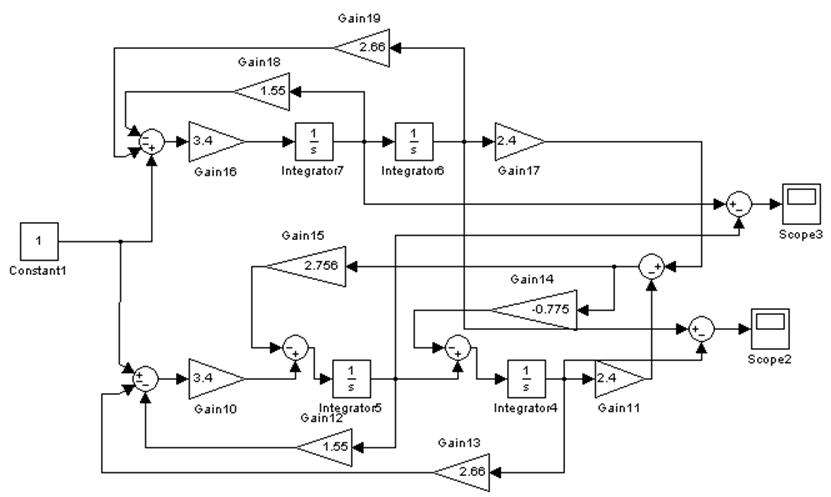
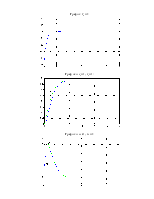
График ![]() :
:
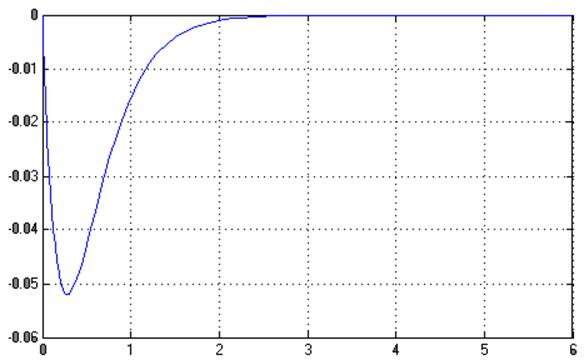
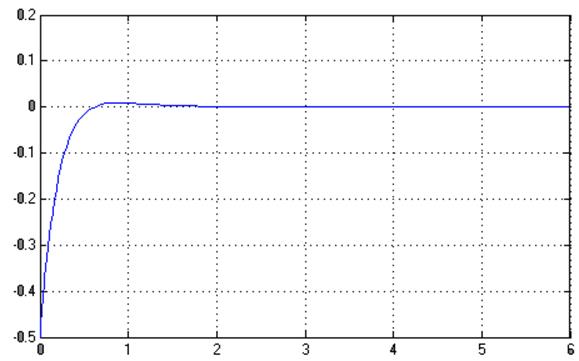
График ![]() :
:
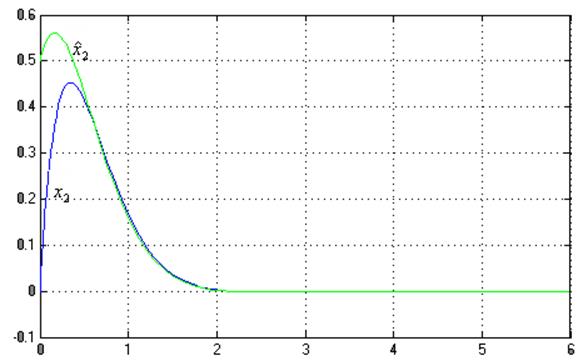
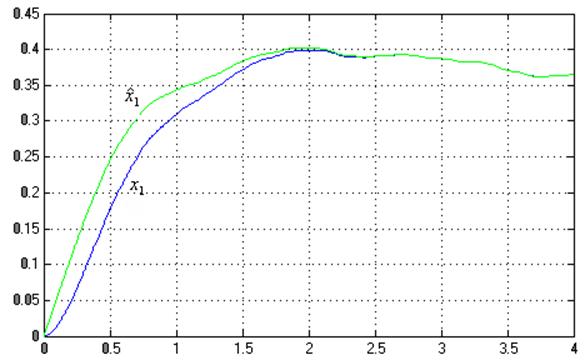
Графики ![]() ,
, ![]() :
:
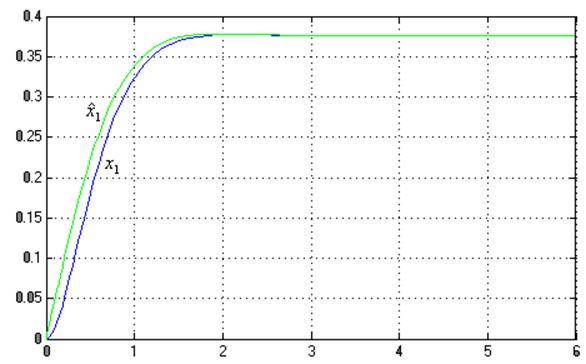
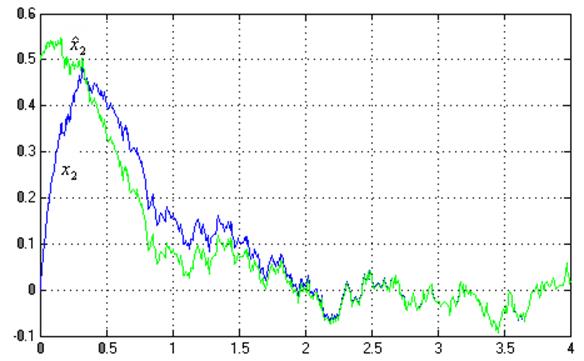
Графики ![]() ,
, ![]() :
:
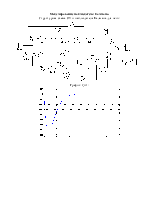
Моделирование наблюдателя Калмана.
Структурная схема ОУ и наблюдателя Калмана для него:
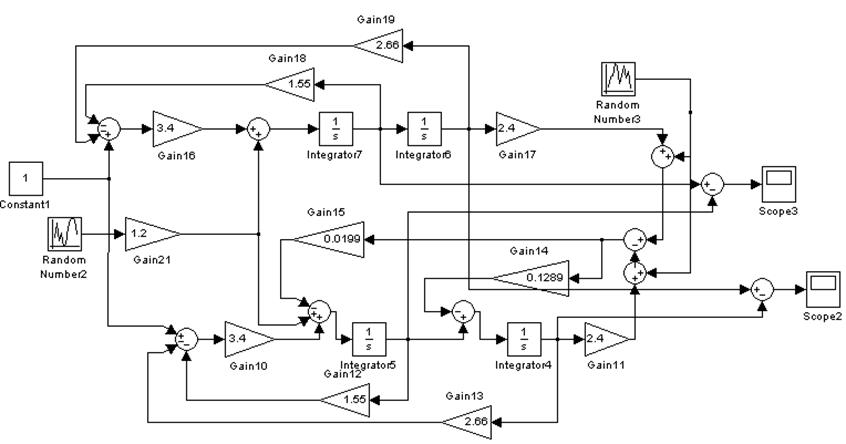
График ![]() :
:
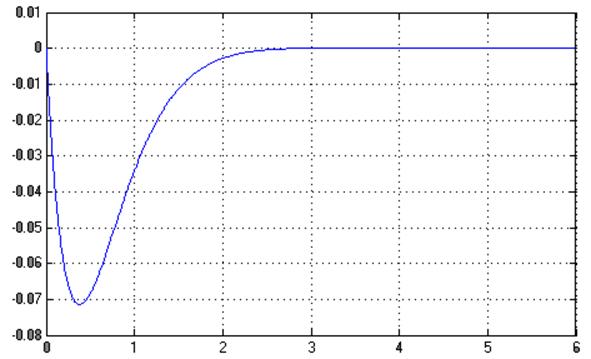
График ![]() :
:
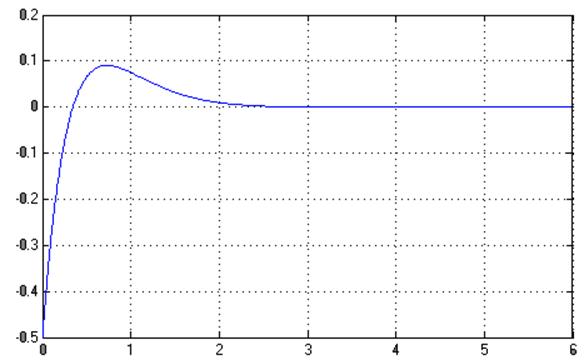
Графики ![]() ,
, ![]() :
:
Графики ![]() ,
, ![]() :
:
Структурные схемы обоих наблюдателей идентичны и отличаются только коэффициентами L.
Как видно из графиков, динамические и статистические свойства систем с различными наблюдателями совпадают с незначительными отклонениями.
Для моделирования случайных возмущений использовались генераторы шумов, которые вводили случайные изменения параметров модели.
Выводы: В данной расчетно-исследовательской работе был произведен синтез устройств оценки полной размерности переменных состояния полета
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.