![]() . (20)
. (20)
Proof of proposition 2 can be found in [2].
Algebraic condition (20) of belonging to image always holds if matrix B is of full rank, because its columns make basis.
So, it is possible to assign any desired structure of eigenvectors if rank of matrix B is equal to dimension of state vector of the plant. In this case problem of achieving of parametric invariance can be solved with feedback matrix K of the form
![]() , (21)
, (21)
where ![]() ,
, ![]() .
.
For such a case it is possible to assign desired
structure of eigenvectors by substituting ![]() . Matrix
is solution of system of matrix equations
. Matrix
is solution of system of matrix equations
![]() , (22)
, (22)
![]() , (23)
, (23)
where equation (22) is Sylvester matrix equation [3,4].
3. MAIN RESULT
As practice of control systems design
shows, setting requirements of quality of transients and steady-state
performance by assigning of desired structure of eigenvalues is of no
difficulty. But it is more difficult to set requirements for desired structure
of eigenvectors. If rank of matrix D is less than rank of matrix B than
there appear freedom of assigning of eigenvectors structure with fixed
eigenvectors ![]() ,
, ![]() and
non-fixed eigenvectors
and
non-fixed eigenvectors ![]() ,
, ![]() , and
hence, freedom in realization of matrix K and problem of evaluation of
control cost and its distribution on sphere of initial conditions emerge. Let
us use the following functional to evaluate control cost for assigning of every
structure of desired eigenvectors and uniformity of its distribution
, and
hence, freedom in realization of matrix K and problem of evaluation of
control cost and its distribution on sphere of initial conditions emerge. Let
us use the following functional to evaluate control cost for assigning of every
structure of desired eigenvectors and uniformity of its distribution
![]() , (24)
, (24)
where ![]() is grammian [5] of
control cost, computed by virtue of Lyapunov-like equation
is grammian [5] of
control cost, computed by virtue of Lyapunov-like equation
![]() ; (25)
; (25)
![]() – maximal singular value [6] of grammian
– maximal singular value [6] of grammian ![]() ;
; ![]() is condition number of grammian
is condition number of grammian ![]() .
. ![]() determines maximal control cost, and
determines maximal control cost, and ![]() characterizes
uniformity of distribution of these costs in sphere of initial conditions.
characterizes
uniformity of distribution of these costs in sphere of initial conditions.
Let us illustrate choice of desired structure of eigenvectors with the following example.
4. EXAMPLE
“Choice of desired eigenvectors, assigned by minimal control for 2nd order plant with full-rank control matrix”
Consider 2nd order plant, described by the
following matrices  ,
,  ,
, ![]() , than matrix
, than matrix ![]() takes the form
takes the form  .
.
Let us assign desired structure of
eigenvalues of matrix ![]() of closed-loop system as
of closed-loop system as ![]() . First vector of eigenvectors structure is
. First vector of eigenvectors structure is
![]() , and the second one is given in
parameterized form
, and the second one is given in
parameterized form  , where
, where ![]() is angle of rotation of
is angle of rotation of ![]() around point of origin.
around point of origin.
Matrix ![]() takes
diagonal form
takes
diagonal form  and matrix of similarity of matrices
and matrix of similarity of matrices ![]() and
and ![]() , which
contains eigenvectors, is
, which
contains eigenvectors, is  .
.
Let us solve Sylvester matrix equation relatively to
matrix ![]() and compute feedback matrix
and compute feedback matrix ![]() with equation (23)
with equation (23)
 ,
,
and find values of angle ![]() for
which functional (24) takes minimal and maximum values.
for
which functional (24) takes minimal and maximum values.
Figure 1 shows dependence of maximal
singular value and condition number on value of angle ![]() .
Dependencies on the figure show, that functional (24) takes minimal value at
angle
.
Dependencies on the figure show, that functional (24) takes minimal value at
angle ![]() . Thus we conclude that matrix
. Thus we conclude that matrix ![]() should be chosen as
should be chosen as  to ensure the least control cost.
to ensure the least control cost.
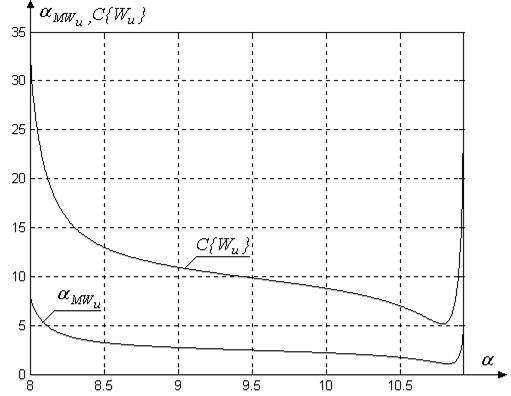
Figure 1. Dependence of maximal singular value ![]() and condition number
and condition number ![]() on value of angle
on value of angle ![]() .
.
In the given work a functional which helps finding of minimal control cost while assigning parametric invariance is proposed. Results are illustrated by an example.
6. ACKNOLEGEMENT
The author is grateful to Department of Control Systems and Informatics of SPb SUITMO for favourable research atmosphere and A. V. Ushakov for helpful discussing and approval of results presented in the paper.
[1] Slita O. V., Ushakov A. V., Model Representation of the Control Object in the Task of Parametric Invariance. // Proceedings of institutes of higher education. Priborostroeniye. 2006. V. 49. № 1. pp.14–20. (In Russian).
[2] Slita O. V., Ushakov A. V., Rank Factor of Control Matrix of a Dynamical Plant in Problem of Achieving Parametrical Invariance.// Modern Technologies: Collected articles/ edited by S.A. Kozlov., SPb SITFMO (TU), 2003. pp.253–259. (In Russian).
[3] Nikiforov V.O., Ushakov A.V. Control in uncertain conditions: sensitiveness, adaptation, robustness. Saint-Petersburg: SPb SITFMO (TU), 2002. (In Russian).
[4] Ushakov A.V. Generalized modal control. // Proceedings of institutes of higher education. Priborostroeniye. 2000. V. 43. № 3. pp.8–16. (In Russian).
[5] Mironovsky L. A. Functional Diagnostics of Dynamic Systems. M – SPb.: MSU – GRIF Publishers, 1998.
[6] G. H. Golub and C. F. Van Loan, Matrix conputations/ M.: Mir, 1999. (in Russian).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.