
COMPUTER MODELLING OF PROCESSES IN МЕCHATRONICS EXECUTIVE DEVICES WITH TERMINATORS OF COORDINATES
Anton V. Gribanov
The Scientific head Professor Sergey I. Malafeev
Department of Information Technologies
Vladimir State University
Gorky st. 87, Vladimir, 600000, RUSSIA
Tel: +7(4922) 279992, E-mal: anton.gribanov@gmail.com
Abstract — Results of modeling of processes in mechanotronic systems in case of coordinate limitation are regarded in this work Processes appearing in systems with mechanical limitations, trips of mechanical drive, end switches and speed limitations are researched.
1. NTRODUCTION
Modern development of industrial automatics and robotics is characterized by rapid update of technical control means, development of new approach to building systems and their analysis. Executive devices play important role in systems of workflow automation. Today functional and constructive merge of electromechanical, power and informating-controlling components happens as the result of evolution of executive devices. In other words there happens creation of mechanotronic systems possessing new properties in comparison with traditional executive devices. At the same time problems of analysis and synthesis of mechanotronic systems with the help of new theoretical and technical approaches including computer modeling obtains particular interest.
Questions of analysis and modeling of mechanotronic systems in case of limitation of coordinates during movement are considered in this work.
2. MODELLING OF PROCESSES IN MECHANOTRONICAL SYSTEMS WITH DIFFERENT TYPES OF LIMITATIONS
Limitation of coordinates is provided virtually in all executive devices for the purpose of eliminating breakages of mechanisms and motors, decreasing consumption current [1]. Implementation can vary a lot – from simplest mechanical constraint to complex path control systems based on microcontrollers.
It is necessary to have a mathematical description or model for calculations and analysis of systems with limitations.
Mathematical model of a system with nonlinearity of constraint type is, which can be used to model all kind of limitations, is considered in present work.
System with electromechanical transducer and reduction gears is considered I this work.
4 ways of implementation of constraint are compared:
a) Decrease of motor speed when approaching to extreme position and disconnection of motor from transfer mechanism when reached extreme position;
b) Switching-off motor power supply when reached extreme position;
c) Disconnection of motor from transfer mechanism when reached extreme position;
d) Physical stop of moving part.
Modeling was made in Matlab with the help of Simulink [2].
2.1. System with end switches and speed limitation.
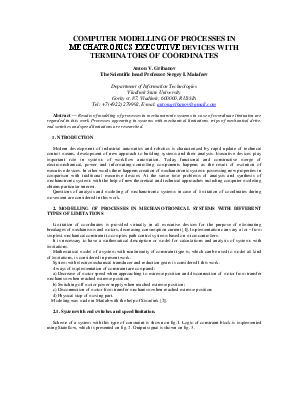
Scheme of a system with this type of constraint is shown on fig.1. Logic of constraint block is implemented using Stateflow, which is presented on fig. 2. Output signal is shown on fig. 3.
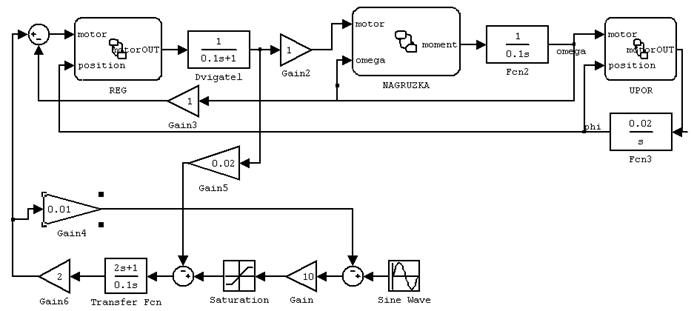
Fig. 1. Scheme of system with constraint of 1st type.
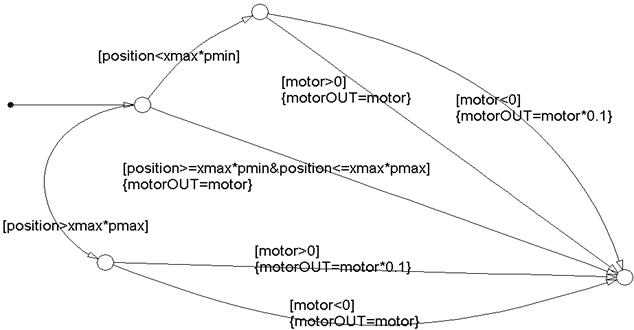
Fig. 2. Stateflow chart of constraint block of 1st type.
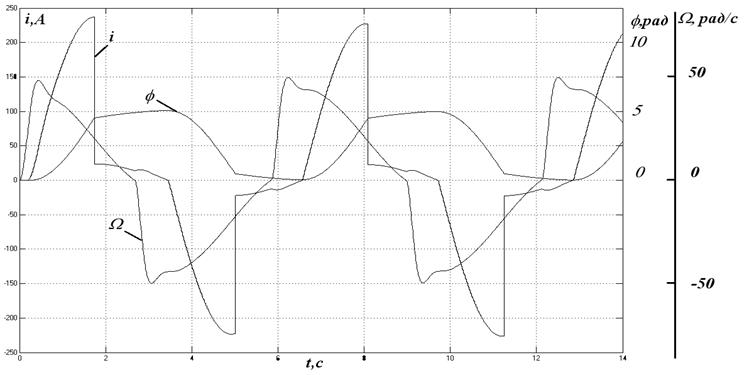
Fig. 3. Output signal using constraint of 1st type.
2.2. System with end switches.
Scheme of a system with this type of constraint is shown on fig. 4. Output signal is shown on fig. 5.
Fig. 4. Scheme of system with constraint of 2nd type.
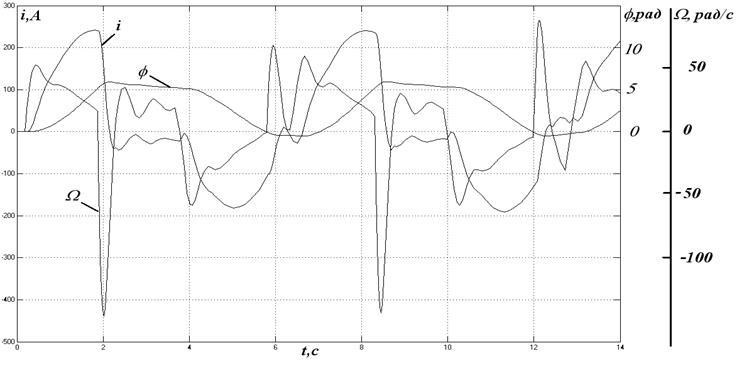
Fig. 5. Output signal using constraint of 2nd type.
2.3. System with trips of mechanical drive.
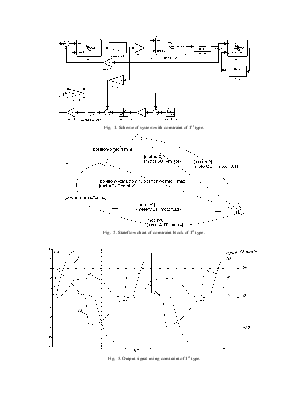
Scheme of a system with this type of constraint is shown on fig. 6. Logic of constraint block is implemented using Stateflow. Stateflow chart is presented on fig. 7. Output signal is shown on fig. 8.
2.4. System with mechanical limitations.
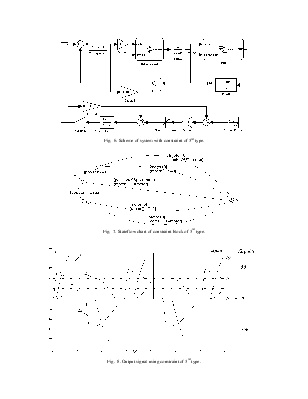
Scheme of a system with this type of constraint is shown on fig. 9. Output signal is shown on fig. 10.
Fig. 6. Scheme of system with constraint of 3rd type.
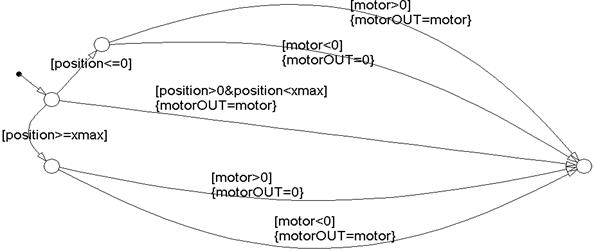
Fig. 7. Stateflow chart of constraint block of 3rd type.
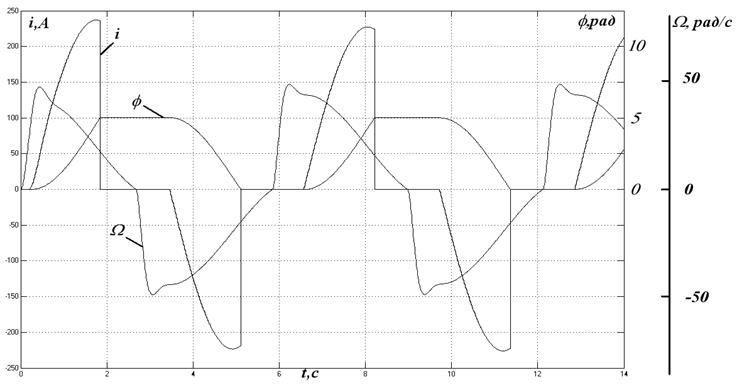
Fig. 8. Output signal using constraint of 3rd type.
Fig. 9. Scheme of system with constraint of 4th type.
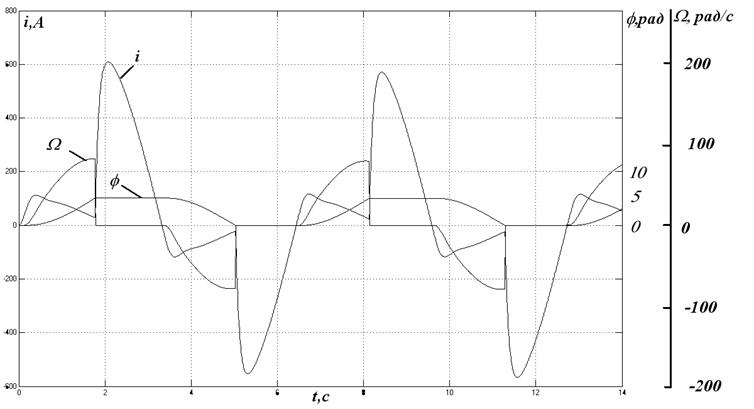
Fig. 5. Output signal using constraint of 4th type.
3. CONCLUSION
Considered models of mechanical systems allowed examining processes appearing in case of coordinate limitation subject not only to physical processes but to characteristics of technical devices. Results of computer modeling give grounds to choice of motors by power and parametric synthesis of control devices and choice of protective switch algorithms.
4. REFERENCES
1. B.R Andryevskii, A.L. Fradkov, Elements of Mathematical Modeling in MATLAB5 and Scilab, Saint-Petersburg: Nauka, 2001 (in Rusian).
2. S.I. Malafeev, A.A. Malafeeva, Modelling and Estimating of Automatic Systems, Vladimir: Posad, 2003 (in Russian).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.