Санкт-Петербургский Государственный Университет Информационных Технологий Механики и Оптики
Кафедра Систем Управления и Информатики
Лабораторная работа №6
" Полный синтез и стабилизация выхода"
Выполнил: Исаева Е.Г.
Шим Е.В
группа 4147
Преподаватель: Герасимов Д.Н.
Санкт-Петербург
2007
Цель работы: исследовать нелинейный объект управления, методом полного синтеза осуществить его стабилизацию.
Рассмотрим систему второго порядка:
1. Запишем нормальную форму системы, т.е. уравнения
внешней динамики ![]() и внутренней
(нулевой) динамики
и внутренней
(нулевой) динамики ![]() в форме:
в форме:
1.1. Найдем уравнение внешней динамики:

1.2. Найдем уравнения внутренней (нулевой) динамики:

Нормальная форма системы имеет вид:
 , при этом
, при этом 
2. Осуществим точную линеаризацию с помощью следующего алгоритма:
3. Для нормальной формы найдем виртуальное управление
![]() , обеспечивающее
стабилизацию нуль-динамики и заданное время переходного процесса
, обеспечивающее
стабилизацию нуль-динамики и заданное время переходного процесса ![]() :
:
4. Введем в рассмотрение ошибку ![]() и найдем преобразованную модель
системы в координатах (z,e):
и найдем преобразованную модель
системы в координатах (z,e):
5. Найдем управляющее воздействие ![]() , обеспечивающее стабилизацию ошибки
и время переходного процесса
, обеспечивающее стабилизацию ошибки
и время переходного процесса ![]() :
:
6. Схема моделирования:

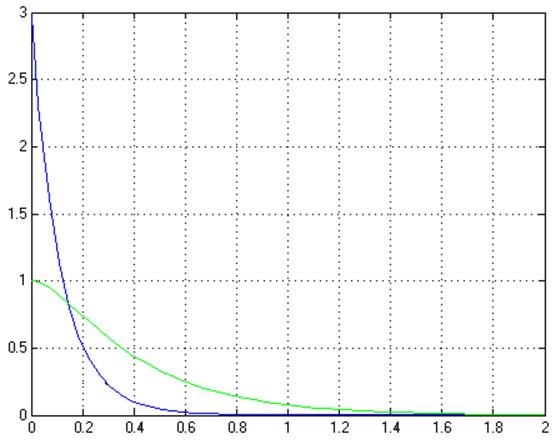
Графики переходных процессов:
7. Фазовый портрет системы:
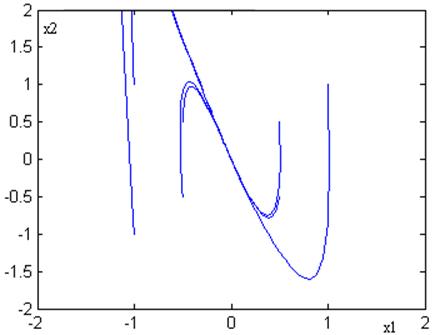
Система устойчива. Равновесное состояние (0,0) - аттрактор.
Область притяжения ![]() .
.
Вывод: в данной работе исследовалась гладкая динамическая система, которая была приведена к нормальной {каскадной (треугольной)} форме. В результате, методом попятного синтеза была стабилизирована нулевая динамика нелинейного ОУ и ошибка для заданного времени переходного процесса.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

