Силы трения функционально зависят от нормальных сил, в которых можно выделить две составляющие. Первая компонента появляется вследствие распределения масс автомобиля, в то время как вторая компонента объясняется переносом масс. Для передних колес первая компонента записывается так:
 , для задних так:
, для задних так:
 .
.
Вторая составляющая нормальной силы связана с осевым перемещением веса, вызванным ускорением или торможением. Её можно найти, используя теорему об изменении кинетического момента системы. Рассмотрение моментов относительно точки контакта шины и дороги для переднего колеса дает
![]() , где
, где ![]() является ускорением
автомобиля. Поделив обе части на
является ускорением
автомобиля. Поделив обе части на ![]() , получим нормальную
силу, действующую на переднее колесо, вызванную переносом веса:
, получим нормальную
силу, действующую на переднее колесо, вызванную переносом веса:
 .
.
Аналогично получаем выражение второй составляющей нормальной силы, действующей на заднее колесо:
 .
.
Общая нормальная сила, действующая на переднее колесо, есть
 , а
общая нормальная сила, действующая на заднее колесо, есть
, а
общая нормальная сила, действующая на заднее колесо, есть
 .
.
Обозначим
 ,
,
 ,
,
 .
.
Тогда общая нормальная сила, действующая на переднее колесо, может быть выражена следующим образом:
![]() .
. ![]()
А общая нормальная сила, действующая на заднее колесо, получается как
![]()
![]() .
.
Далее определяем суммарную силу трения:
![]() .
.
Применение
второго закона Ньютона относительно оси ![]() дает
дает
![]() .
.
Объединяя приведенные выше два уравнения, получим формулу
![]()
 .
.
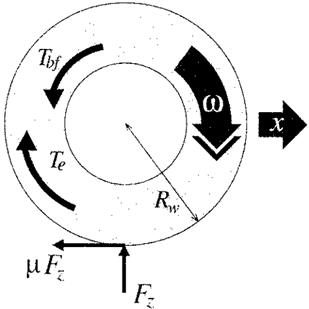
Рис. 4: Диаграмма сил, действующих на переднее колесо
Далее, используя рис. 4, выведем уравнения,
моделирующие динамику переднего и заднего колес. Пусть ![]() —
крутящий момент, передаваемый от двигателя переднему колесу (предполагаем, что
рассматриваемый автомобиль переднеприводный),
—
крутящий момент, передаваемый от двигателя переднему колесу (предполагаем, что
рассматриваемый автомобиль переднеприводный), ![]() —
тормозной момент, прикладываемый к переднему колесу,
—
тормозной момент, прикладываемый к переднему колесу, ![]() —
тормозной момент, прикладываемый к заднему колесу, и
—
тормозной момент, прикладываемый к заднему колесу, и ![]() —
радиус колеса. Пусть
—
радиус колеса. Пусть ![]() обозначает угловую скорость
переднего колеса, а
обозначает угловую скорость
переднего колеса, а ![]() — угловую скорость заднего
колеса. Тогда можно получить динамические уравнения для переднего и заднего
колес:
— угловую скорость заднего
колеса. Тогда можно получить динамические уравнения для переднего и заднего
колес:
![]()
![]()
![]() ,
,
![]() .
.
Подставляя (1) и (2) в равенства (4) и (5), получим
![]()
 ,
,
![]()
 .
.
Тормозной момент, приложенный к заднему колесу, связан с тормозным моментом, приложенным к переднему колесу, равенством
![]()
![]() , где
, где
![]() — коэффициент пропорциональности,
выражающий соотношение этих двух моментов. Обычное значение
— коэффициент пропорциональности,
выражающий соотношение этих двух моментов. Обычное значение ![]() лежит в диапазоне от 0,2 до 0,6. Таким
образом, момент
лежит в диапазоне от 0,2 до 0,6. Таким
образом, момент ![]() есть часть момента
есть часть момента ![]() . Это помогает предотвращать блокировку заднего колеса
даже, если блокируется переднее, что обеспечивает определенную маневренность
автомобиля.
. Это помогает предотвращать блокировку заднего колеса
даже, если блокируется переднее, что обеспечивает определенную маневренность
автомобиля.
Из подстановки (8) в (7) находим
![]()
 .
.
Модель тормозной системы автомобиля описывается
соотношениями (3), (6), (9). Определим переменные состояния ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
Используя эти переменные, представим модель тормозной системы автомобиля в
форме пространства состояний:
.
Используя эти переменные, представим модель тормозной системы автомобиля в
форме пространства состояний:
![]()
где значения параметров описываются в табл. 1. Выходные значения:
![]()
 .
.
Следует заметить, что вышеописанная модель тормозной системы состоит только из четырёх, хотя и нелинейных, дифференциальных уравнений. Тем не менее, она достаточно точно характеризует поведение исследуемой системы.
Моделирование
На основе (10), (11) была составлена Simulink-модель исследуемой системы. Она представлена на рис. 5. В этой модели была использована простейшая схема управления тормозным моментом, основанная на сравнении значения коэффициента проскальзывания для текущего момента времени с его оптимальным значением для данных дорожных условий.
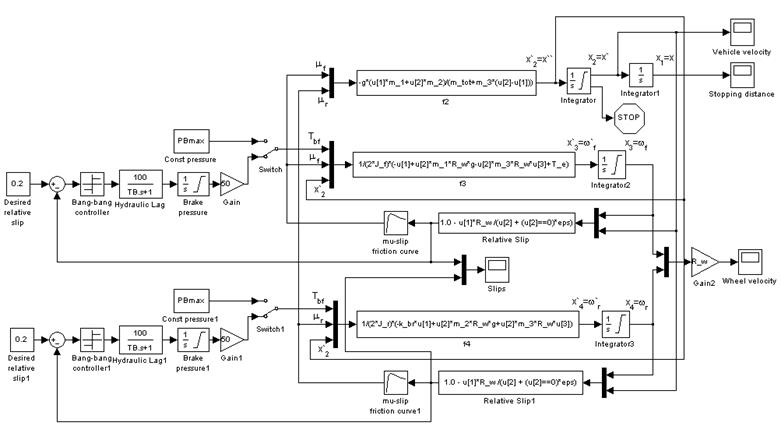
Рис. 5: Simulink-диаграмма модели тормозной системы
На рис. 6, 7, 8 представлены графики параметров тормозной системы с выключенной АБС.

Рис. 6: Тормозной путь автомобиля, не оборудованного АБС
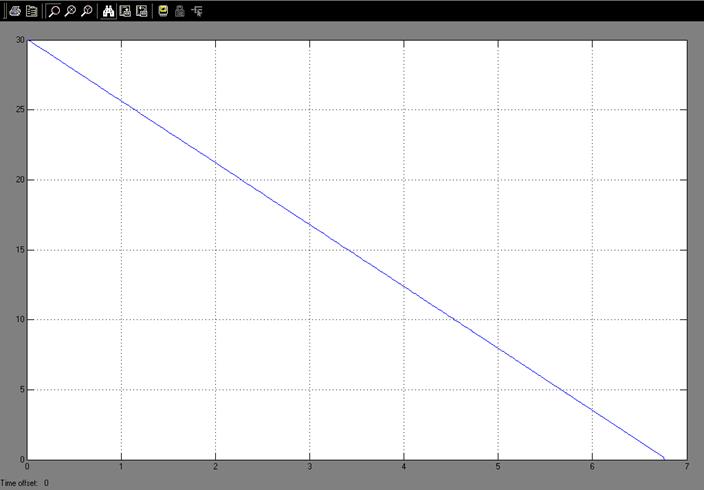
Рис. 7: Скорость автомобиля, не оборудованного АБС
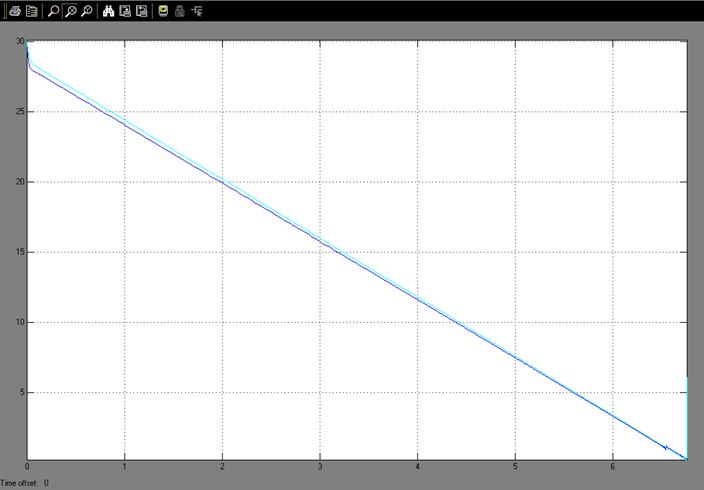
Рис. 8: Скорости колёс передней и задней осей автомобиля, не оборудованного АБС
На рис. 9, 10, 11, 12 представлены графики параметров тормозной системы с АБС.

Рис. 9: Тормозной путь автомобиля, оборудованного АБС
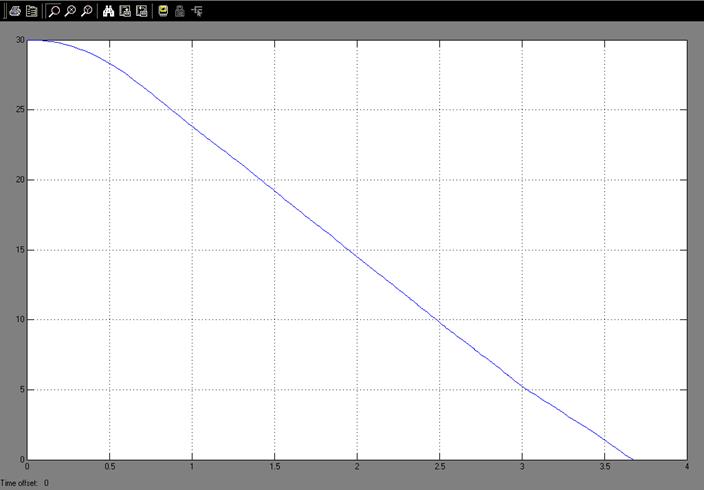
Рис. 10: Скорость автомобиля, оборудованного АБС

Рис. 11: Скорости колёс передней и задней осей автомобиля, оборудованного АБС

Рис. 12: Проскальзывания ![]() и
и ![]() колёс автомобиля, оборудованного АБС
колёс автомобиля, оборудованного АБС
Из рис. 6–11 видно, что автомобиль, оснащенный АБС, затратил на торможение в 1,5 раза меньше времени по сравнению с автомобилем, не оборудованным АБС. Также примерно в 1.7 раза сократился и тормозной путь.
Заключение. Выводы
Итак, была исследована динамика торможения автомобиля и построена модель этого процесса. Результаты моделирования показывают, что использование даже простейшего закона управления тормозным моментом повышает эффективность торможения — уменьшаются тормозной путь и время торможения, улучшается манёвренность транспортного средства.
Очевидна необходимость разработки более совершенной модели АБС. Для этого нужно спроектировать два дополнительных компонента: контроллер тормозного момента, регулирующий давление в тормозной системе, и блок, оценивающий коэффициент трения между шинами и дорогой. Также требуется получить алгоритм взаимодействия этих двух подсистем.
Библиографическийсписок
· Yonggon Lee and Stanislaw H. Zak. Designing a genetic neural fuzzy antilock-brake-system controller.
· Wei-En Ting and Jung-Shan Lin. Nonlinear control design of anti-lock braking systems combined with active suspensions.
· B. Ewers, J. Bordeneuve-Guibé, Corinne Langlois. A symbolic sensor for an antilock brake system of a commercial aircraft.
· Jingang Yi, Luis Alvarez, Roberto Horowitz. Adaptive emergency braking control with underestimation of friction coefficient.
· Mark Denny. The dynamics of antilock brake systems.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.