Арзамасский Политехнический Институт
Филиал Нижегородского Государственного Технического Университета
кафедра "Прикладная математика"
Курсовая работа
Модель антиблокировочной системы тормозов автомобиля
Выполнил студент гр. АСПМ 3–1 Воробьёв А. П.
Арзамас, 2006 г.
АРЗАМАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
|
к курсовой работе
Воробьёв Андрей Павлович
Факультет Информатики Электроники Приборостроения
Кафедра Прикладная математика
Группа АСПМ 3-1
Дата защиты «_______» ________________________2006 г.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
АРЗАМАССКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
Кафедра Прикладная математика
Заведующий кафедрой
(подпись) __________ Пакшин П. В.
(дата) ____________
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
Руководитель
(подпись) __________ Фомин Д. М.
(дата) ____________
Студент
(подпись) __________ Воробьёв А. П.
(дата) ____________ (гр.) АСПМ 3-1
Проект защищён (дата) _____________
Протокол № ____________________
С оценкой ______________________
2006 г.
Содержание
1. Введение. Постановка задачи………………………………………..………3
2. Модель тормозной системы автомобиля ……………………...……………4
3. Моделирование………………………………………………………………10
4. Заключение. Выводы………………………………………………………...15
5.
Библиографический список……………………………………….…...……16
Введение. Постановка задачи
Тормозная система любого транспортного средства является важнейшей частью системы безопасности водителя и пассажиров. От качества её работы напрямую зависят жизни и здоровье людей. Улучшить характеристики тормозов призвана антиблокировочная система.
Чтобы погасить скорость автомобиля, требуется приложить к его колёсам тормозной момент. При определённом значении тормозного момента колёса блокируются, т. е. перестают вращаться, однако автомобиль всё ещё имеет некоторую скорость и продолжает двигаться на скользящих колёсах (юзом). В этом случае сцепление с дорогой уменьшается, следовательно теряется манёвренность автомобиля, увеличиваются тормозной путь и время торможения. Экспериментальные данные говорят о том, что процесс торможения осуществляется гораздо эффективнее, если не допускать полного блокирования колёс.
Датчики АБС непрерывно следят за скоростями автомобиля и колёс. Когда обнаруживается недопустимая рассогласованность этих величин, блок управления выдаёт сигнал уменьшить давление колодок на тормозные барабаны. Это приводит к кратковременному освобождению колёс. Сила трения возрастает, а у водителя появляется возможность управлять автомобилем. Когда колёса наберут определённую скорость вращения, от АБС поступает команда на их остановку. Эта последовательность действий повторяется с достаточно высокой частотой (обычно 10–15 раз в секунду).
Первым этапом процесса создания контроллера АБС является построение верной динамической модели изучаемого явления, которая должна отражать все его важные характеристики. Разработке модели тормозной системы посвящена эта работа.
Модель тормозной системы автомобиля
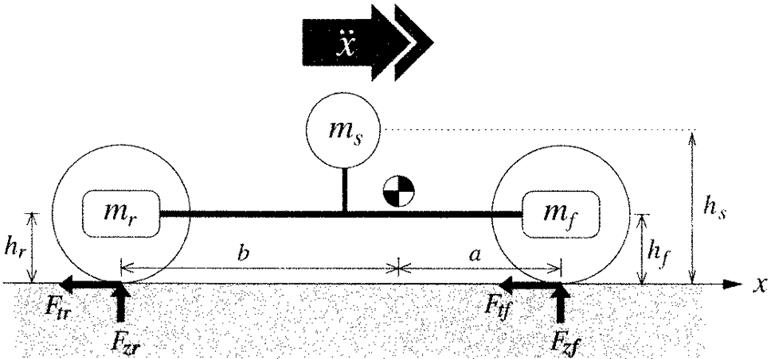
Рис. 1: Модель тормозной системы
|
|
ускорение свободного падения |
9,81 м/с2 |
|
|
расстояние от центра масс до передней оси |
1,186 м |
|
|
расстояние от центра масс до задней оси |
1,258 м |
|
|
расстояние от земли до центра масс кузова |
0,6 м |
|
|
расстояние от земли до центра масс переднего колеса |
0,3 м |
|
|
расстояние от земли до центра масс заднего колеса |
0,3 м |
|
|
полная масса автомобиля |
1500 кг |
|
|
масса кузова |
1285 кг |
|
|
масса передних колес |
96 кг |
|
|
масса задних колес |
119 кг |
|
|
момент инерции переднего колеса |
1,7 кг•м2 |
|
|
момент инерции заднего колеса |
1,7 кг•м2 |
|
|
радиус колеса |
0,326 м |
|
|
крутящий момент двигателя |
0 Н•м |
|
|
коэффициент пропорциональности тормозных моментов |
0,5 |
Табл. 1: Обозначения, принятые в работе
Будем считать, что торможение происходит на
прямолинейном участке строго горизонтальной дороги без участия рулевого
управления. Графическое изображение модели представлено на рис. 1. Обозначения, используемые в дальнейшем изложении,
приведены в табл. 1. Силы трения,
действующие на передние и задние колёса, обозначим ![]() и
и ![]() соответственно. Суммарная сила трения
соответственно. Суммарная сила трения ![]() равна
равна
![]() ,
,
где
![]()
и
![]() .
.
Здесь ![]() и
и ![]() являются нормальными силами, действующими
на передние и задние колёса соответственно, а
являются нормальными силами, действующими
на передние и задние колёса соответственно, а ![]() —
коэффициент трения, зависящий от проскальзывания колёс. Для переднего колеса
—
коэффициент трения, зависящий от проскальзывания колёс. Для переднего колеса ![]() , а для заднего
, а для заднего ![]() .
.
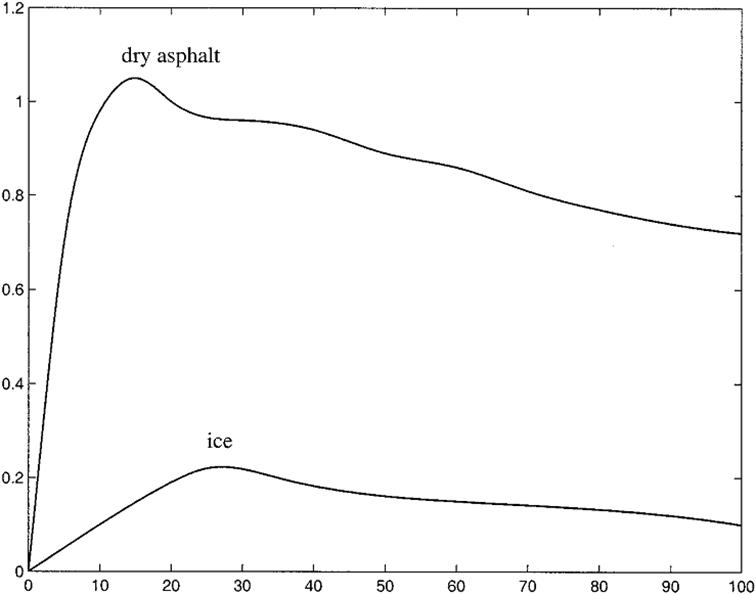
Рис. 2: Функция ![]() для
разных дорожных условий
для
разных дорожных условий
Проскальзывание колеса определяется как
 , где
, где
![]() — скорость автомобиля;
— скорость автомобиля;
![]() — угловая скорость колеса;
— угловая скорость колеса;
![]() — радиус колеса.
— радиус колеса.
Отметим, что ![]() , причем
будем измерять
, причем
будем измерять ![]() в процентах. Блокирование колёс
происходит при
в процентах. Блокирование колёс
происходит при ![]() , что эквивалентно
, что эквивалентно ![]() . Тем не менее, как показано на рис. 2 блокирование колёс не доставляет максимума коэффициенту
трения и, следовательно, не ведёт к максимальной силе торможения. Разным
дорожным условиям соответствуют определённые значения оптимального параметра
проскальзывания, например, как следует из рис. 2, для обледенелой дороги
максимальная сила торможения развивается при значении
. Тем не менее, как показано на рис. 2 блокирование колёс не доставляет максимума коэффициенту
трения и, следовательно, не ведёт к максимальной силе торможения. Разным
дорожным условиям соответствуют определённые значения оптимального параметра
проскальзывания, например, как следует из рис. 2, для обледенелой дороги
максимальная сила торможения развивается при значении ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.