управляемого электропривода при отсутствии
справочных данных
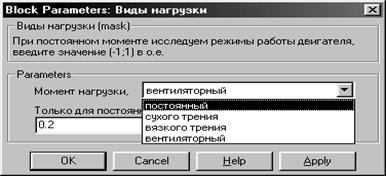
Актуальность вопроса обусловлена тем, что по мере широкого использования средств преобразовательной техники все большее распространение получают регулируемые и управляемые приводы на базе асинхронных электродвигателей (АД) с к.з. роторами.
Для работы в составе таких приводов эти АД при разработке не предназначались. В каталогах, проспектах и пр. документации на них не приводится момент инерции ротора. Вместе с тем проектантам, ориентированным на разработку представленных выше приводов это бывает необходимо с целью оценки динамических, регулировочных и др. свойств. В этих условиях реальным представляется 2 метода экспериментального определения момента инерции:
- без разборки АД с применением оценки потерь на трение и вентиляцию с последующим использованием кривой выбега АД после отключения от сети;
- путем фиксации периода крутильных колебаний с последующим расчетом по формуле маятника.
Схема опыта для первого случая согласно рис.1. Опыт строится по методу разделения потерь, имеющихся в ДПТ (гонный двигатель) при пристыкованном и отсоединенном АД.
|
. |
|
|
Рис. 1. |
Рис. 2 |
По итогам опыта определяются потери, которые имеют место в АД при его номинальной скорости вращения, но на холостом ходу (1). Далее определяется момент, соответствующий этим потерям (2) и на основе уравнения движения (3) с использованием производной, найденной по кривой выбега на момент начала выбега (рис.2) определяется искомый момент инерции (4).
|
|
|
Достоинства: не надо разбирать АД.
Недостатки: нужно много оборудования для монтажа и измерений; точность ограничена возможностями получения и обработки кривой выбега с целью оценки производной от скорости.
Для второго метода надо вынуть ротор из машины, определить его массу m и подвесить его на жестких средствах (с учетом веса) согласно рис. 3.
При малом начальном угле закрутки (не более 100) замерить период крутильных колебаний Т. Последующее – с использованием формулы 5.
|
|
|
Достоинства: точность определения диктуется взвешиванием и определением размеров.
Недостатки: необходимость разборки и сборки машины
Принципы разработки блок-диаграмм электроприводов на основе двигателей постоянного тока
независимого возбуждения (ДПТ НВ)
Все возможное многообразие математических моделей электроприводов постоянного тока с коллекторными электродвигателями независимого возбуждения иллюстрирует приведенный ниже рисунок.
|
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() функциональные
функциональные
![]() виртуальные
виртуальные
По форме тока
![]()
![]() гладкие
гладкие
пульсирующие
По исполнению источника питания
![]() регулируемые
регулируемые
нерегулируемые
![]() По типу источника питания
По типу источника питания
![]() управляемый выпрямитель (УВ)
управляемый выпрямитель (УВ)
широтно-импульсный преобразователь (ШИП)
По исполнению ЭП
![]()
![]() разомкнутый
разомкнутый
![]()
![]() замкнутый
замкнутый
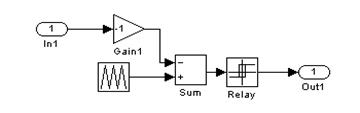
Для обеспечения режимов стабилизации скорости вращения в современных электроприводах в большинстве случаев реализуется система подчиненного управления с установкой регуляторов в контуре тока якоря и скорости. При необходимости здесь же учитываются ограничения по току якоря, задатчики интенсивности разгона. В состав средств управления могут входить и датчики технологического режима.
|
|
демодулятор к нему |
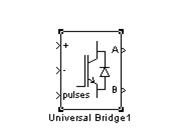
Виртуальная модель УВ |
|
Функциональная и |
виртуальная модели ШИПа |
|
Для изучения принципа работы ДПТ НВ независимо от особенностей его электропитания целесообразно использовать приведенные ниже блок-диаграммы. Обращается особое внимание на необходимость выполнения и интерфейса пользователя.
а
|
|
|
|
б |
в |
Разработка функциональной модели ДПТ НВ выполняется под вид уравнений, приведенных ниже
|
|
где относительные переменные состояния двигателя:
|
Вид процессов, позволяющих уяснить режимы работы ДПТ НВ, иллюстрирует следующий рисунок.
|
а) двигательный режим |
б) режим противовключения |
в) генераторный режим
Функциональная модель электропривода с подчиненным управлением, например, с управляемым выпрямителем, приведена ниже. Целесообразно её разработать с интерфейсом пользователя и возможностью замены УВ на ШИП.
Пример реализации виртуальной модели электропривода (следующий рисунок) необходимо довести до рабочего состояния и иллюстрировать работу. Для этого иметь модель при себе. При составлении этой блок-диаграмм нужно использовать ранее представленные функциональные модели
а
|
|
в |
Переходные процессы в системе при различных настройках регуляторов в контуре скорости иллюстрирует следующий рисунок. Вопросами собеседования будет реализация настроек регуляторов с учетом ограничений по скорости и току.
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 (2)
(2) (3)
(3) (4)
(4) Рис.3.
Рис.3. (5)
(5) Виртуальная модель ДПТ НВ и
Виртуальная модель ДПТ НВ и 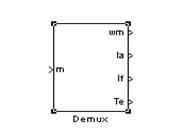
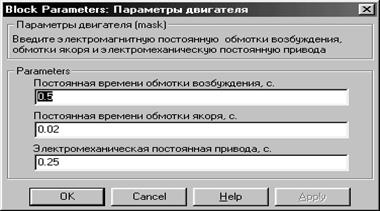
 ; параметры двигателя
; параметры двигателя
 .
.
 б
б