Ключи работают одновременно, т.е., например, на первом
интервале замкнуты ключи К1 и К3 и на левый зажим якоря подан плюс, а на втором
интервале замкнуты ключи К2 и К4 и левый зажим подан минус источника. В
результате к двигателю подается напряжение ![]() .
Считая g=t1/tц и учитывая, что t2=tц-t1,
получим Uср=(2g-1)U. Следовательно
механическая характеристика определится выражением wср=((2g-1)/kэм)U – (Rя/kэм2)M. Изменяя g, можно изменить не только значение, но и направление угловой скорости.
При 1³g³0,5 угловая
скорость пр холостом ходе положительна, при 0,5³g³0 она отрицательна.
.
Считая g=t1/tц и учитывая, что t2=tц-t1,
получим Uср=(2g-1)U. Следовательно
механическая характеристика определится выражением wср=((2g-1)/kэм)U – (Rя/kэм2)M. Изменяя g, можно изменить не только значение, но и направление угловой скорости.
При 1³g³0,5 угловая
скорость пр холостом ходе положительна, при 0,5³g³0 она отрицательна.
По техническим данным ДПТ СЛ-621 можно сформулировать технические требования к устройству управления:
1. Устройство управления должно обеспечивать угловую скорость, как положительную, так и отрицательную. При этом диапазон изменения частоты вращения должен находиться в диапазоне ±Wmax рад/сек.
2. Номинальное напряжение подводимое к двигателю должно обеспечиваться порядка 110В.
3. Полная электрическая мощность, подводимая к двигателю равна P=U(Iя+Iв)=110В*2,46А=270,6Вт. Соответственно наше устройство управления должно быть способно обеспечить данную мощность.
4. Номинальные значения токов в моменты запуска и торможения будут превышаться. Как видно в нашем случае Iторм=3,086А – что превышает номинальное значение чем в 1,342 раза.
5. Выбор транзисторов К1-К4, а также 4-х диодов обуславливается, величиной напряжения питания, максимального тока двигателя.
6. Во всех предыдущих пунктах необходимо также учитывать и погрешности.
 ;
;
![]() рад/с;
рад/с;
Электромагнитный коэффициент![]() (для ДПТ с независимым возбуждением)
(для ДПТ с независимым возбуждением)
![]() ;
;
Электромеханическая постоянная времени ДПТ:
![]() с;
с;
Индуктивность якоря (в связи
с отсутствием каталожных данных об индуктивности обмотки якоря, определяем ![]() по след формуле, где принимаем
по след формуле, где принимаем![]()
![]() Гн;
Гн;
Электромагнитная постоянная времени цепи якоря:
![]() c;
c;
Передаточный коэффициент двигателя при управлении скоростью равен:
![]() ;
;
Таким образом, передаточная функция двигателя будет:
![]() .
.
При использовании двигателя постоянного тока практически единственным возможным способом регулирования скорости является импульсное управление. Как правило, в технике электропривода используется широтно-импульсная модуляция (ШИМ). Усилитель мощности должен представлять собой широтно-импульсный преобразователь, который питается от сети 380В, 50Гц. Входной ток и напряжение преобразователя: Iвх = 1мА,
Uвх = ±10В. Выходной ток и напряжение: Iвых = 0,3А, Uвых = 110В + 20%. Частота модуляции составляет 1кГц ( при использовании тиристорных ключей), соответственно, Тц = 1мс.
Передаточная функция усилителя мощности имеет вид:
 ,где
,где  ,
, ![]() .
.
После соответствующих подстановок передаточная функция усилителя
 .
.
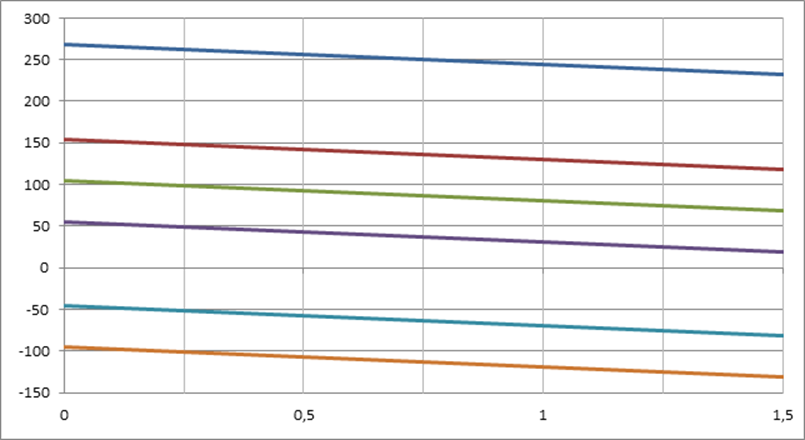
Механические характеристики – зависимость n=f(M), при U=const, R=const.
Механические
характеристики двигателя при импульсном управлении определяются следующим
выражением: ![]() .
.
![]() Н*м/А.
Н*м/А.
Естественные характеристики можно построить из формулы:
![]() .
.
Исходя из этого выражения, построим механические характеристики двигателя для всех режимов работы (рис.5).
![]()
![]()
Рис. 5. Механические характеристики двигателя для всех режимов работы.
Результирующая схема моделирования будет иметь вид:
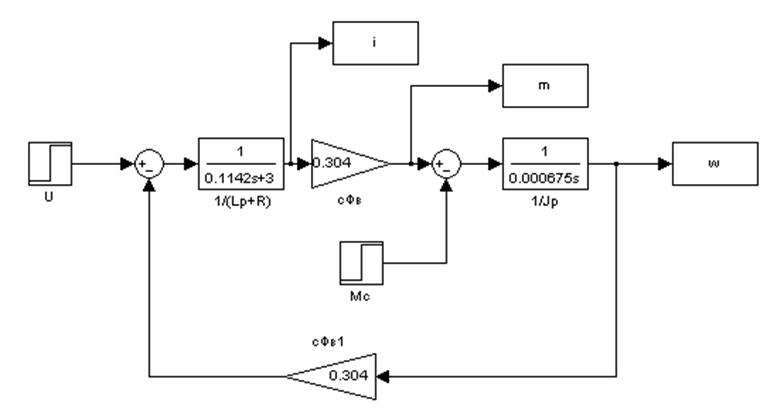
Рис. 6. Схема моделирования ДПТ на основе ШИП.
Процесс на выходе – зависимость частоты от времени (рис.7).
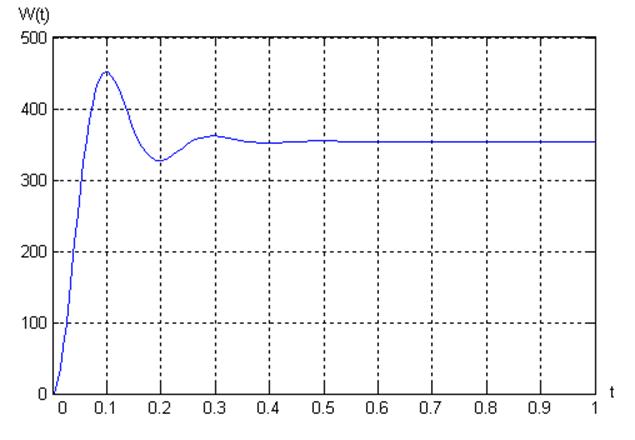
Рис. 7. График зависимости частоты от времени.
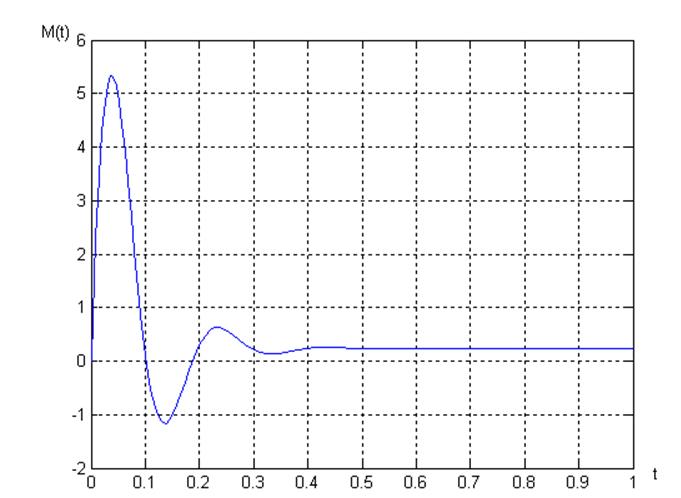
Рис. 8. График зависимости момента от времени.
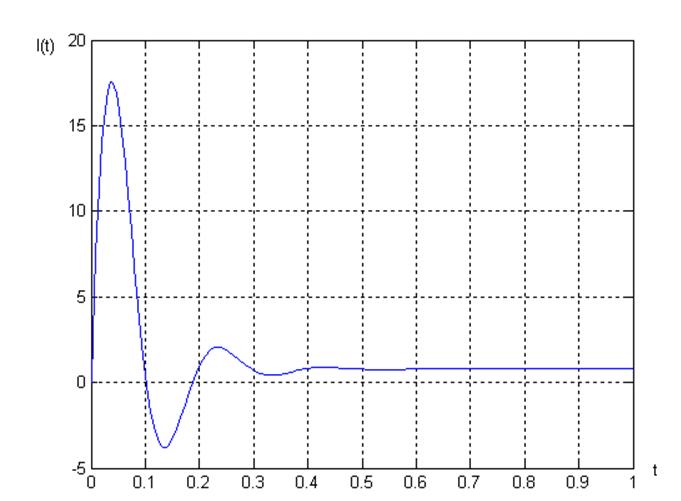
Рис. 9. График зависимости тока от времени.
Переходные процессы для тока и
момента похожи, т.к. момент с током в ДВТ связаны через линейное соотношение![]() .
.
По заданному моменту нагрузки и построенной по исходным данным тахограмме для системы стабилизации скорости выбран ДПТ СЛ-621. Для изменения частоты вращения двигателя используется широтно-импульсное управление. Проверка по теплу показала, что выбранный двигатель не будет перегреваться при работе в соответствии с заданной тахограммой. Следовательно, СЛ-621 может использоваться в указанной системе.
1. Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. М.: Высшая школа, 1986.
2. Курс лекций по ТСА за 7-ой учебный семестр 2007-2008 учебного года. НТГУ, 2007.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.