- заданный тормозящий (пусковой) момент ![]() не должен превышать пусковой момент двигателя,
определенный производителем.
не должен превышать пусковой момент двигателя,
определенный производителем.
![]() ⇒
⇒![]()
Исходя из вышеприведенных требований к ДВТ выберем СЛ-621, обладающий следующими характеристиками:
Таблица 4. Характеристики ДПТ СЛ-621.
|
Номинальное напряжение, В |
110 |
|
Номинальная мощность, Вт |
172 |
|
Номинальный ток возбуждения, А |
0,16 |
|
Номинальный ток якоря, А |
2,3 |
|
Номинальная частота вращения, об/мин |
2400 |
|
Номинальный вращающийся момент, Н*м |
0,7 |
|
Пусковой момент, Н*м |
1,25 |
|
Момент инерции якоря, кг*см2 |
6,75 |
|
Статический момент трения, Н*м |
0,038 |
|
Сопротивление обмотки якоря, Ом |
3 |
|
Сопротивление обмотки возбуждения, Ом |
560 |
|
Коэффициент самоиндукции якоря |
35 |
Расчет частоты вращения двигателя и вращающего момента с редуктором (КПД – 75%):
![]() , где j – передаточное число редуктора, тогда
, где j – передаточное число редуктора, тогда
![]() ,
,
![]() , где
, где ![]() - КПД редуктора.
- КПД редуктора.
Момент сопротивления Мс , который должен преодолевать двигатель, складывается из нагрузочного момента Мнаг , приведенного к валу двигателя, и статического момента трения самого двигателя Мтр:
![]() .
.
При
изменении угловой скорости возникает динамический момент ![]() , обусловленный моментом инерции вращающихся частей:
, обусловленный моментом инерции вращающихся частей:
![]() , где
, где ![]() - момент инерции якоря.
- момент инерции якоря.
Момент
пуска по условию равен:![]()
![]()
Момент при пуске:
![]()
Момент торможения по условию равен:
![]()
Момент
при торможении равен:![]()
![]()
Момент при установившемся движении:
![]()
Время пуска для каждого момента времени рассчитывается по формуле:

Время торможения для каждого момента времени рассчитывается по формуле:

Значения времен разгона и времен торможения приведены в таблице 5.
Таблица 5.
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
tпск,ms |
0,073 |
0,146 |
0,219 |
0,146 |
0,073 |
0,073 |
0,146 |
|
tстп,ms |
0,036 |
0,072 |
0,108 |
0,072 |
0,036 |
0,036 |
0,072 |
Номинальный ток якоря и вращающий момент связаны соотношением
![]() , следовательно,
расчет токов при пуске, торможении и в установившемся режиме имеет вид:
, следовательно,
расчет токов при пуске, торможении и в установившемся режиме имеет вид:
![]()
![]() ;
;
![]() А;
А;
![]() А.
А.
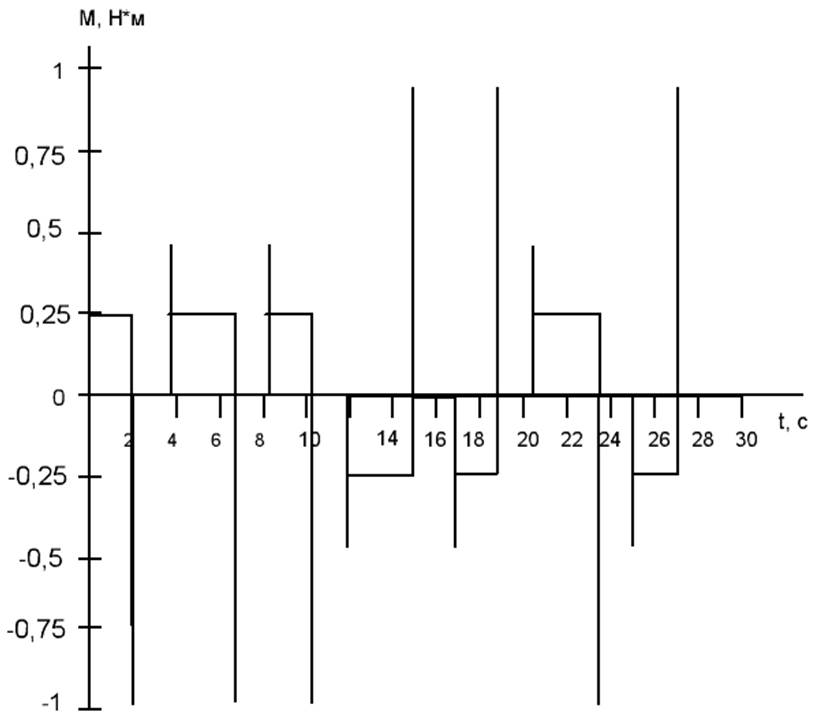
Рис. 2. Временная диаграмма моментов двигателя.
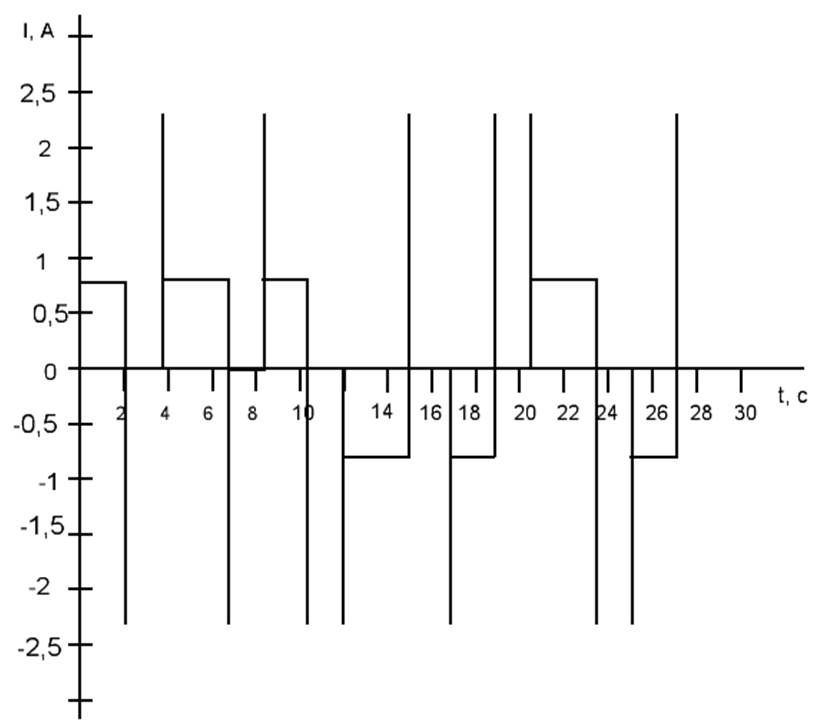
Рис. 3. Диаграмма токов в двигателе.

Таблица 6.
|
n |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
0,016 |
0,031 |
0,047 |
0,031 |
0,016 |
0,016 |
0,031 |
|
|
0,032 |
0,063 |
0,095 |
0,063 |
0,032 |
0,032 |
0,063 |
|
|
0,107 |
0,157 |
0,095 |
0,157 |
0,107 |
0,164 |
0,101 |
|
Сумма |
0,155 |
0,251 |
0,237 |
0,251 |
0,155 |
0,212 |
0,195 |
 Н*м,
Н*м,![]() Н
Н![]()
Т.к.
![]() , следовательно, двигатель не будет перегреваться.
, следовательно, двигатель не будет перегреваться.
Для управления частотой вращения ДПТ можно использовать следующие системы: генератор–двигатель (Г–Д), электромашинный усилитель–двигатель (ЭМУ–Д), магнитный усилитель–двигатель (МУ–Д), управляемый выпрямитель–двигатель (УВ–Д), широтно-импульсный преобразователь–двигатель (ШИП–Д).
Импульсное управление ДПТ с помощью ШИП на транзисторных ключах позволяет создавать системы управления, не уступающие по точности и диапазону регулирования системам Г–Д, ЭМУ–Д, МУ–Д, а по экономичности и массогабаритным показателям намного превосходящие их. Система ШИП–Д обладает близкими с системой УВ-Д показателями.
В качестве устройства управления двигателя будем использовать реверсивный широтно-импульсный преобразователь (рис. 4).
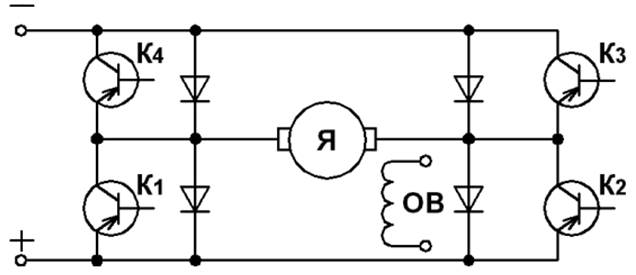 |
Рис. 4. Реверсивный широтно-импульсный преобразователь
Управление осуществляется по мостовой схеме, образованной четырьмя транзисторными ключами, к одной диагонали которой подведено напряжение питающей сети, а к другой присоединён якорь двигателя.
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу напряжению источника.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.