Значит, принимая во внимание преимущества данной схемы управления,
рационально использовать систему ШИП-Д с транзисторными ключами при построении
системы стабилизации скорости ДПТ. К якорю подводится напряжение, среднее
значение которого ![]() определяется относительным
временем замкнутого состояния транзисторного ключа (скважностью)
определяется относительным
временем замкнутого состояния транзисторного ключа (скважностью) ![]() , где
, где ![]() –
длительность замкнутого состояния ключа;
–
длительность замкнутого состояния ключа;
![]() – длительность цикла.
– длительность цикла.
Изменение скважности позволяет регулировать угловую скорость ДПТ в широких пределах. Наибольшее распространение нашло широтно-импульсное управление, при котором изменятся длительность замкнутого состояния ключа при неизменной длительности цикла.
В
результате к двигателю подается напряжение ![]() .
Скважность
.
Скважность ![]() , где
, где ![]() -
длительность цикла. Тогда
-
длительность цикла. Тогда ![]() . Механическая
характеристика определяется выражением
. Механическая
характеристика определяется выражением .
.
Изменяя g, можно изменить не только значение, но и направление вращения угловой скорости. При 1³g³0.5 угловая скорость при холостом ходе положительна, при 0.5³g³0 она отрицательна [1, 99].
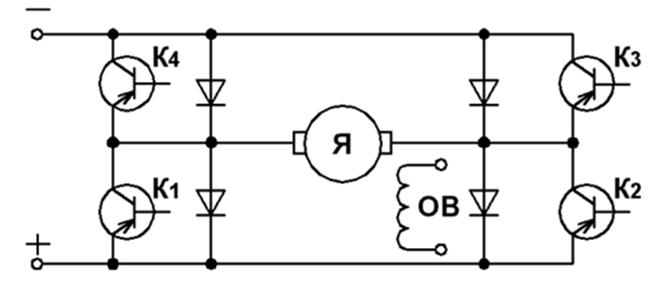
Рис. 4. Реверсивный широтно-импульсный преобразователь
По техническим данным ДПТ СЛ-621 можно сформулировать технические требования к устройству управления:
-
Устройство управления должно
обеспечивать угловую скорость, как положительную, так и отрицательную. При этом
диапазон изменения частоты вращения должен находиться в диапазоне ![]() .
.
- Номинальное напряжение, подводимое к двигателю 110В.
-
Устройство управления должно
обеспечить полную электрическую мощность, подводимую к двигателю (![]() ).
).
Номинальные значения токов в моменты
запуска и торможения превышаются. Значения токов торможения и пуска (![]() ) превышают номинальное (
) превышают номинальное (![]() )
значение в 1,25 раза.
)
значение в 1,25 раза.
Выбор транзисторов К1-К4, а также 4-х диодов обуславливается величинами напряжения питания и максимального тока двигателя.
Причем, во всех пунктах необходимо учитывать погрешности.
 ;
;
 ;
;
Электромагнитный
коэффициент ![]() (для ДПТ с независимым возбуждением)
(для ДПТ с независимым возбуждением)

Электромеханическая постоянная времени ДПТ:

Индуктивность
якоря (в связи с отсутствием каталожных данных об индуктивности обмотки якоря,
определяем ![]() по следующей формуле, где принимаем
по следующей формуле, где принимаем ![]() )
)

Электромагнитная постоянная времени цепи якоря:
Передаточный коэффициент двигателя при управлении скоростью равен:
 ;
;
Таким образом, передаточная функция двигателя будет:
При
использовании двигателя постоянного тока практически единственным возможным
способом регулирования скорости является импульсное управление. Как правило, в
технике электропривода используется широтно-импульсная модуляция (ШИМ). Усилитель
мощности должен представлять собой широтно-импульсный преобразователь, который
питается от сети 380В, 50Гц. Входной ток и напряжение преобразователя: ![]() Выходной ток и напряжение:
Выходной ток и напряжение: ![]() Частота модуляции составляет 1кГц (при
использовании тиристорных ключей), соответственно,
Частота модуляции составляет 1кГц (при
использовании тиристорных ключей), соответственно, ![]()
Передаточная функция усилителя мощности имеет вид:
 , где
, где  ,
, ![]() .
.
После
соответствующих подстановок передаточная функция усилителя:  .
.
8. Моделирование динамических процессов в технической системе
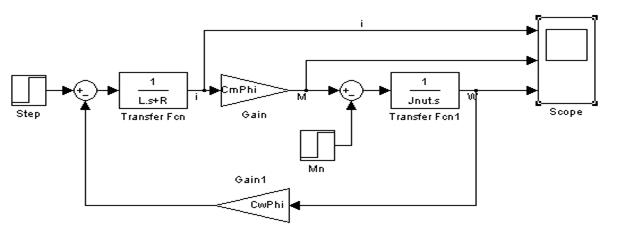
Рис.5. Структурная схема модели двигателя.
Рис. 6. Переходные процессы в двигателе.
В результате работы выбран ДПТ СЛ-621. Для изменения частоты вращения двигателя используется широтно-импульсное управление.
Из результатов моделирования следует:
1) выбранный двигатель и система управления соответствуют заданным характеристикам;
2) Эквивалентный момент нагрузки меньше номинального, следовательно, двигатель не будет перегреваться при работе в соответствии с заданной тахограммой;
3) максимальное значение тока в цепи якоря незначительно превышает номинальное;
4) переходные процессы тока и момента качественно похожи;
5) в замкнутой системе перерегулирование по скорости отсутствует.
В итоге, система электропривода по требованиям технического задания может быть реализована.
10.Список литературы
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. Учебник для вузов. – М.: Высшая школа, 1986.
2. Сабинин Ю.А. Электромашинные устройства автоматики: Учебник для вузов. - Л.: Энергоатомиздат. Ленингр.отделение, 1988.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.