![]()
При изменении угловой скорости возникает
динамический момент ![]() , обусловленный моментом инерции
вращающихся частей.
, обусловленный моментом инерции
вращающихся частей.
![]() , где
, где ![]() кгм2 - момент инерции
якоря
кгм2 - момент инерции
якоря
Момент пуска заданный:
![]()
Момент при пуске:
![]()
Момент торможения заданный:
![]()
Момент при торможении:
![]()
Момент при установившемся движении:
![]()
Расчет времени пуска для каждого момента времени:
 ,с
,с
Расчет времени торможения для каждого момента времени:

Рассчитанные значения времен пуска и торможения заносятся в таблицу 4.
Таблица 4.
|
№ |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
0,0194 |
0,0291 |
0,0389 |
0,0486 |
0,0583 |
0,068 |
0,0777 |
|
|
0,0102 |
0,0153 |
0,0203 |
0,0254 |
0,0305 |
0,0356 |
0,0407 |
Расчет тока при пуске и торможении:
![]()

![]() А
А
![]() А
А
Временные диаграммы моментов и токов ДПТ.
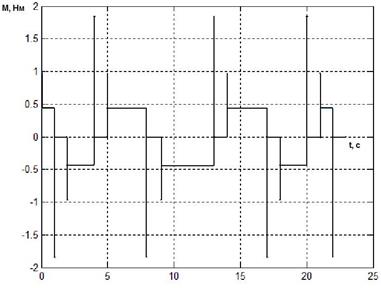
Рис.2. Временная диаграмма моментов Рис.3. Временная диаграмма токов двигателя.
5. Проверка выбранного двигателя СЛ-661 по теплу
Предлагается провести оценку по теплу методом эквивалентного момента. Для того, чтобы двигатель не перегревался, необходимо выполнение условия
![]() .
.
Расчет эквивалентного момента:

![]()
Двигатель не будет перегреваться, так как рассчитанный эквивалентный момент меньше номинального.
В электроприводе в основном применяются системы с подчиненным
регулированием. В них на вход каждого регулятора ![]() подается
сигнал с предыдущего каскада, соответствующий задаваемому уровню регулируемой
величины, и сигнал с выхода данного каскада, отвечающий фактическому уровню.
Важным достоинством данной структуры является возможность простыми средствами
осуществить ограничение любой из координат системы. Для этого достаточно
ограничить задание данной координаты.
подается
сигнал с предыдущего каскада, соответствующий задаваемому уровню регулируемой
величины, и сигнал с выхода данного каскада, отвечающий фактическому уровню.
Важным достоинством данной структуры является возможность простыми средствами
осуществить ограничение любой из координат системы. Для этого достаточно
ограничить задание данной координаты.
Электромагнитная постоянная времени двигателя:
где
![]() – коэффициент
самоиндукции якоря;
– коэффициент
самоиндукции якоря;
![]() – сопротивление обмотки
якоря.
– сопротивление обмотки
якоря.
Электромеханическая постоянная времени двигателя:

Электромагнитный коэффициент, В/рад:

Модель разомкнутого привода на основе ДПТ НВ, модель ДПТ НВ с моментом сопротивления представлены на рис. 4, 5 соответственно.
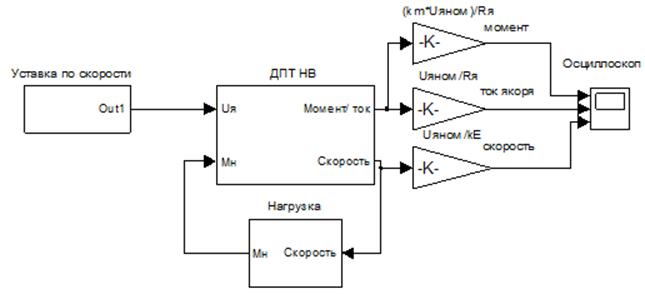
Рис. 4. Функциональная модель разомкнутого привода на основе ДПТ НВ
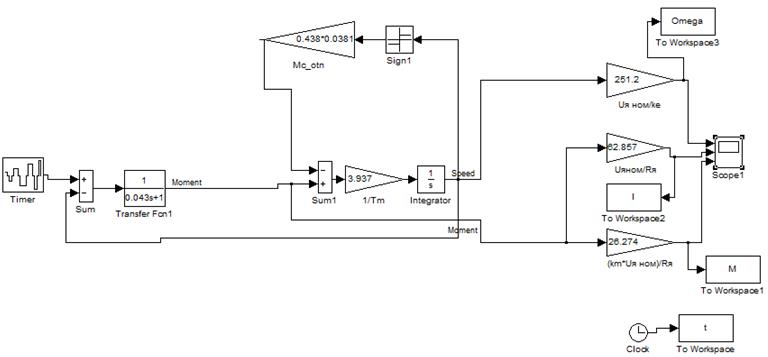
Рис. 5. Модель разомкнутого привода на основе ДПТ НВ.
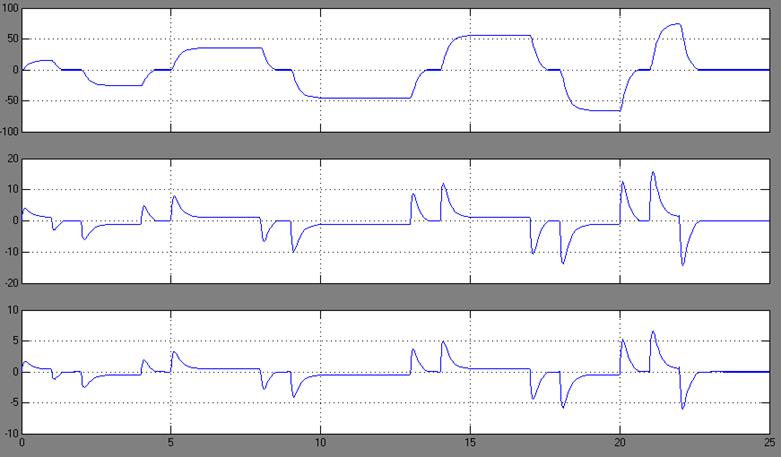
Рис.6. Результаты моделирования, зависимость угловой скорости, тока якоря и момента от времени.
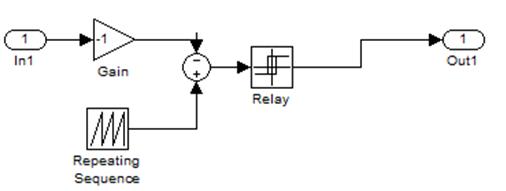
Рис.7. Реализация ШИП.
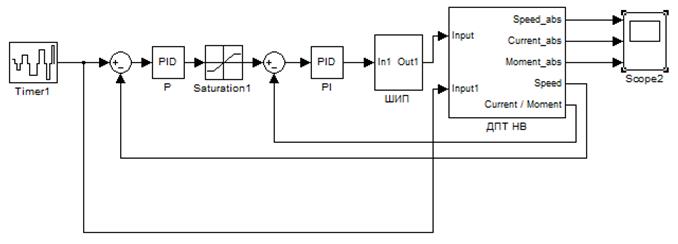
Рис.8. Модель замкнутой системы на основе ДПТ НВ с П и ПИ-регуляторами и ШИП.
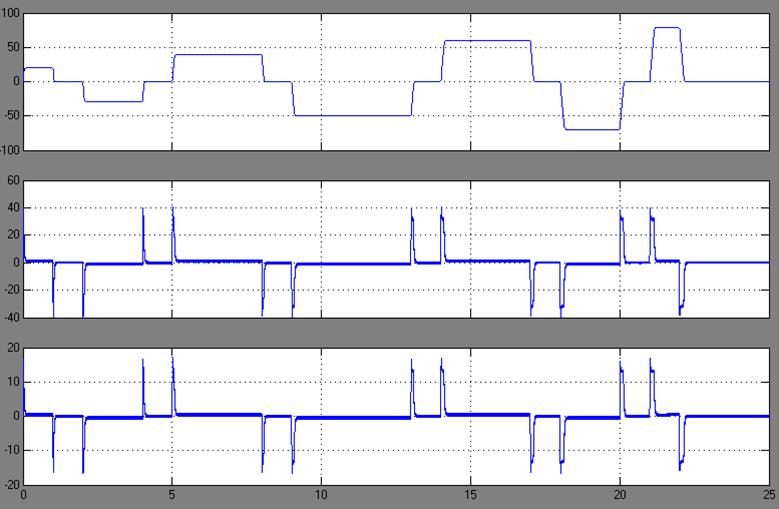
Рис.9. Результаты моделирования, зависимость угловой скорости, тока якоря и момента от времени.
7. Заключение
По заданному моменту нагрузки и построенной по начальным данным тахограмме, был выбран двигатель постоянного тока СЛ-661. Оценка двигателя методом эквивалентного момента показала, что ДПТ СЛ-661 не будет перегреваться, а, следовательно, может использоваться в данной системе. Для изменения частоты вращения двигателя использовано широтно-импульсное управление. Проведено моделирование процессов в разомкнутой и замкнутой системах, получены графики зависимости частоты, тока и момента от времени. Для увеличения быстродействия и уменьшения ошибки при действии возмущений была рассчитана система подчиненного регулирования с использованием П и ПИ-регуляторов.
8. Список использованной литературы
1. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. – М.: Высшая школа, 1986.
2. Конспект лекций по курсу «Технические средства автоматизации и управления».
3. MatLab 7.7
4. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0 СПб.: КОРОНА принт. 2001. -320 с
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.