Расчёт моментов при пуске и торможении:
|
Момент при пуске двигателя: |
|
|
Момент при торможении двигателя: |
|
|
Момент в установившимся режиме работы двигателя: |
|
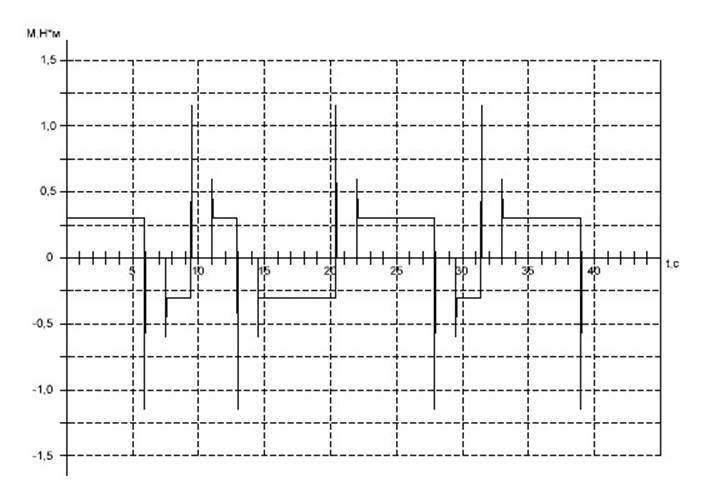
Рисунок – 2 Диаграмма моментов при работе ДПТ
Расчёт токов при пуске и торможении:
|
Общий электромагнитный коэффициент: |
|
|
Ток в установившимся режиме работы двигателя: |
|
|
Ток при запуске двигателя: |
|
|
Ток при торможении двигателя: |
|
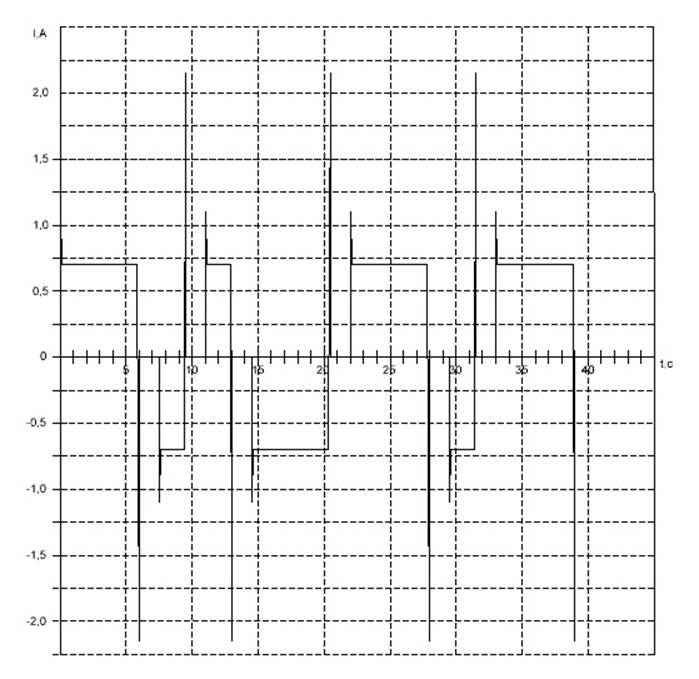
Рисунок – 3 Диаграмма токов при работе ДПТ
4. Проверка ДПТ по теплу, используя метод эквивалентного момента

![]()
![]() , следовательно, в процессе работы
двигатель не будет перегреваться
, следовательно, в процессе работы
двигатель не будет перегреваться
5. Выбор способа управления
В качестве устройства управления двигателя будем использовать реверсивный широтно-импульсный преобразователь (ШИП-Д).
Управление осуществляется по мостовой схеме, образованной четырьмя транзисторными ключами, к одной диагонали которой подведено напряжение питающей сети, а к другой присоединён якорь двигателя. (Рисунок 4).
Диоды служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу напряжению источника.
Ключи работают одновременно, т.е., например, на первом
интервале замкнуты ключи К1 и К3 и на левый зажим якоря подан плюс, а на втором
интервале замкнуты ключи К2 и К4 и на левый зажим подан минус источника. В
результате к двигателю подается напряжение ![]() .
Считая g=t1/tц и учитывая, что t2=tц – t1,
получим Uср=(2g-1)U. Следовательно механическая характеристика определится
выражением wср=((2g-1)/kэм)U – (Rя/kэм2)M. Изменяя g, можно
изменить не только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость при холостом ходе
положительна, при 0,5³g³0 она отрицательна.
.
Считая g=t1/tц и учитывая, что t2=tц – t1,
получим Uср=(2g-1)U. Следовательно механическая характеристика определится
выражением wср=((2g-1)/kэм)U – (Rя/kэм2)M. Изменяя g, можно
изменить не только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость при холостом ходе
положительна, при 0,5³g³0 она отрицательна.
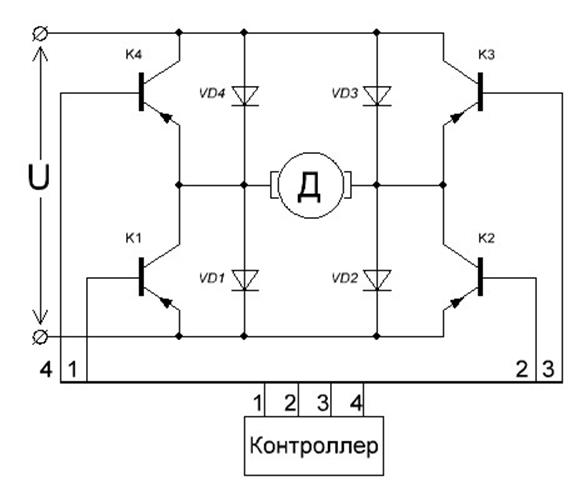
Рисунок –4 Схема ШИП-Д
По техническим данным ДПТ СЛ-569К можно сформулировать технические требования к устройству управления:
· устройство управления должно обеспечивать угловую скорость, как положительную, так и отрицательную. При этом диапазон изменения частоты вращения должен находиться в диапазоне ± Wmax рад/сек;
· номинальное напряжение подводимое к двигателю должно быть порядка 110В.
Выбор транзисторов VT1-VT4, а также диодов VD1-VD4 обуславливается величиной напряжения питания,
максимального тока двигателя.
6. Составление математической модели системы
Передаточная
функция двигателя: ![]()
Для расчёта постоянных времени использованы следующие формулы:
Номинальная частота вращения вала двигателя:
![]()
Общий электромагнитный коэффициент: ![]()
Коэффициент передачи двигателя: ![]()
Индуктивность якоря: ![]() =0,386 Гн
=0,386 Гн
Электромеханическая постоянная времени двигателя: ![]() =14 мс
=14 мс
Электромагнитная постоянная времени якоря: ![]() =9,6 мс
=9,6 мс
Передаточная функция усилителя мощности: ![]()
Расчёт усилителя мощности проводиться при следующих параметрах регулятора (контроллера) , применяемого в системе для реализации способа управления (ШИМ-Д):
![]()
![]()
Входное
напряжение подаваемое на двигатель: ![]()
Коэффициент
усиления: ![]()
Постоянная
времени регулятора: ![]()
Передаточная
функция двигателя: ![]()
Передаточная функция усилителя мощности: ![]()
Для моделирования процессов в двигателе будет использована модель двигателя постоянного тока при управлении скоростью его вращения за счёт изменения напряжения на якоре.
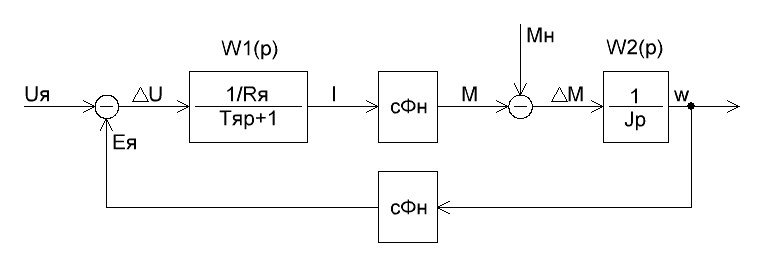
Рисунок – 5 Схема ДПТ при управлении напряжением на якоре
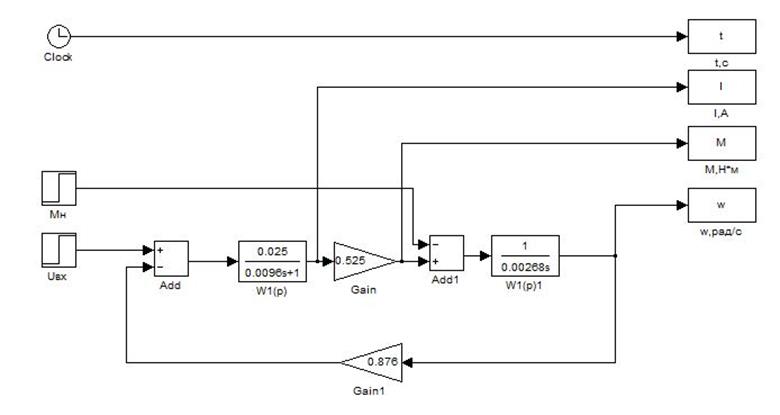
Рисунок – 6 Схема ДПТ, смоделированная в MathLab 2008b
Результаты моделирования:
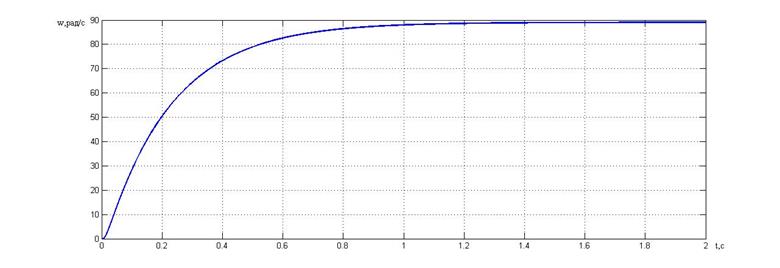
Рисунок – 7 Угловая скорость на выходе ДПТ
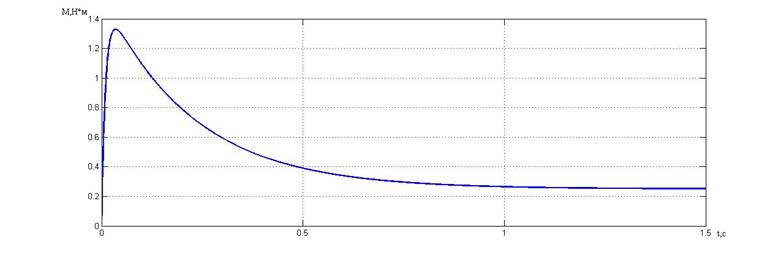
Рисунок - 8 Изменение момента при работе ДПТ
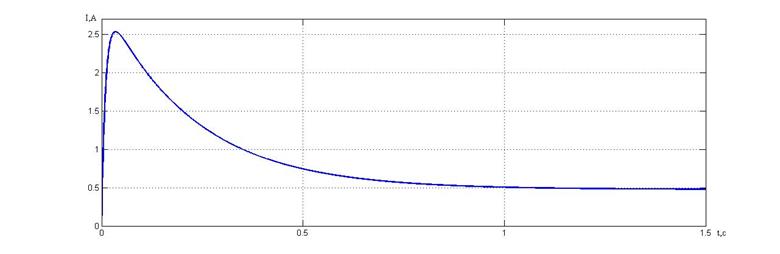
Рисунок – 9 Изменение тока при работе ДПТ
7. Механические характеристики
Механическая характеристика ![]() , строиться при U=const,
R=const.
, строиться при U=const,
R=const.
Механическая характеристика при импульсном управлении имеет вид:
Естественные характеристики можно построить по следующей формуле:
Угловая скорость при идеальном холостом ходу: ![]()
Таблица 5 Исходные данные, для построения механической характеристики
|
|
n,об/мин |
|
|
2 |
20 |
190,985 |
|
3 |
-30 |
-286,478 |
|
4 |
40 |
381,971 |
|
5 |
-50 |
-477,464 |
|
6 |
60 |
572,957 |
|
7 |
-70 |
-668,451 |
|
8 |
80 |
763,943 |
|
1 |
209,523 |
2000,805 |
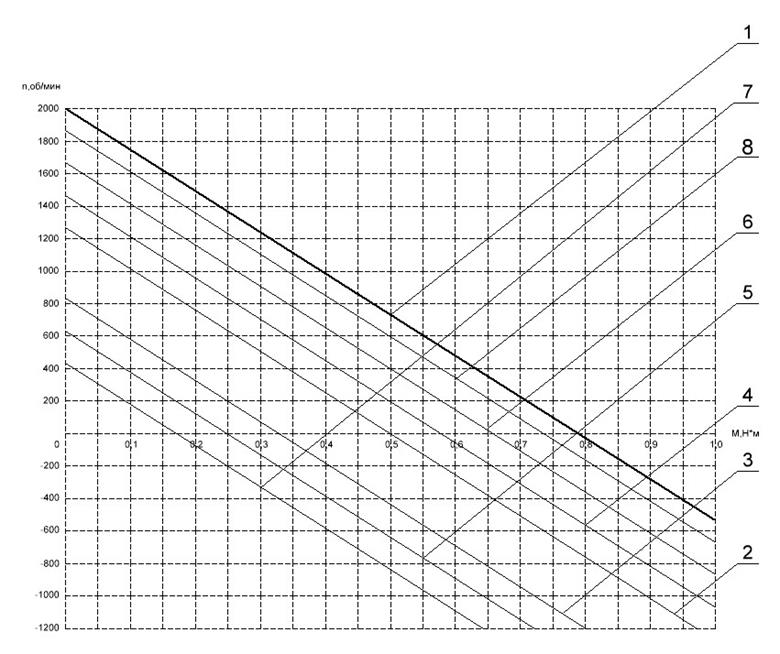
Рисунок – 10 Механические характеристики
Вывод
В соответствии с техническим заданием был произведен расчёт основных параметров для системы стабилизации скорости вращения двигателя и выбран способ управления двигателем в этой системе.
Для реализации системы стабилизации были выбраны:
1. Двигатель СЛ-569К
2. Способ управления: широтно-импульсное
Проверка по методу эквивалентного момента, применяемого для установления возможности перегрева двигателя в процессе работы, показал, что двигатель перегреваться не будет, и система будет работать исправно.
Список литературы
1. Волков Н. И., Миловзоров В. П. Электромашинные устройства автоматики. М.: Высшая школа, 1986.
2. Сабинин Ю. А. Электромашинные устройства автоматики. Л.: Энергоатомиздат, 1988.
3. Русаков О.П. «Технические средства систем автоматики и управления», курс лекций.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.