МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Расчетно-графическая работа №2
по курсу
«Системы автоматической оптимизации»
Факультет: АВТ
Группа: ААМ-10
Студент: Барташ Б. А. Преподаватель:
Французова Г. А.
Вариант: 3
Дата выполнения:
Отметка о защите:
Новосибирск, 2010
Задание
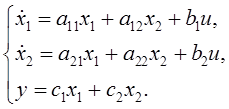
Рассчитать оптимальное управление для объекта, математическая модель которого имеет вид:
Известны ограничение на управляющее воздействия, ![]() , начальная
, начальная ![]() и
конечная точки
и
конечная точки ![]() . Заданы требования к качеству
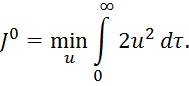
процесса в виде критерия оптимальности
. Заданы требования к качеству
процесса в виде критерия оптимальности 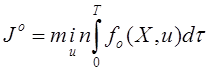 и
длительности процесса
и
длительности процесса ![]() .
.
Численные значения параметров представлены в таблице 1.
Таблица 1.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
-2 |
-3 |
0 |
5 |
2 |
1 |
4 |
0 |
|
|
2 |
Решение
![]() В
соответствии с исходными данными математическая модель объекта будет иметь вид:
В
соответствии с исходными данными математическая модель объекта будет иметь вид:
![]()
![]()
![]()
Для расчета регулятора воспользуемся методом динамического программирования.
Расчетные соотношения метода:
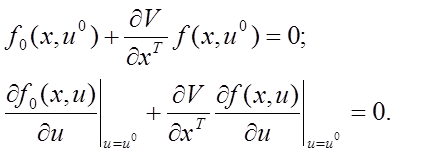
Исходя из этих соотношений, запишем уравнения для нашей системы:

Из второго уравнения найдем оптимальное управление
И подставим в первое уравнение:

Нужно решить это уравнение при граничном условии V(x(T)) = 0. Решение будем искать в квадратичной форме:
![]()
Подставляя это выражение в уравнение Беллмана, получим:
![]()
![]()
Или
![]()
![]()
Последнее равенство тождественно, если
![]()
![]()
![]()
![]()
Система имеет несколько наборов решений:
|
|
|
|
Таким образом, получаем три варианта оптимального управления:
![]()
![]()
![]()
Из них только второй закон управления обеспечивает устойчивый переходный процесс:
![]()
Выводы
С помощью метода динамического программирования решена задача аналитического конструирования оптимального регулятора и получено оптимальное управление для заданного объекта по заданному критерию оптимальности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.

