МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики

Лабораторная работа №4
Группа: АА-66
Студенты: Преподаватель:
Гордеев А. Жмудь В.А.
Мещеряков Д.
Дата сдачи:
Отметка о защите:
Новосибирск, 2010
Цель работы
Моделирование обводного канала и упредителя Смита в программе VisSim; анализ их свойств.
Исходные данные
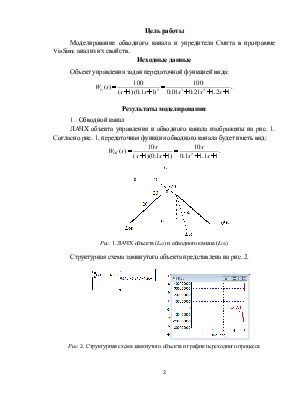
Объект управления задан передаточной функцией вида:

Результаты моделирования
1. Обводной канал
ЛАЧХ объекта управления и обводного канала изображены на рис. 1. Согласно рис. 1, передаточная функция обводного канала будет иметь вид:

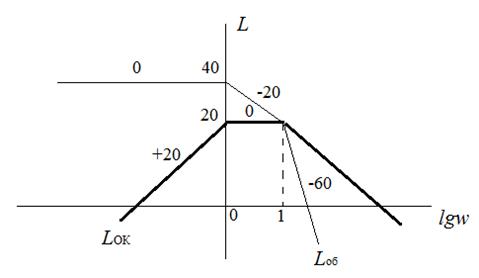
Рис. 1. ЛАЧХ объекта (Lоб) и обводного канала (LОК)
Структурная схема замкнутого объекта представлена на рис. 2.
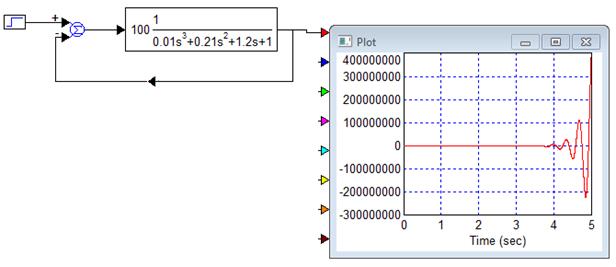
Рис. 2. Структурная схема замкнутого объекта и график переходного процесса
Как видно из рис. 2, переходный процесс в исходном объекте неустойчив.
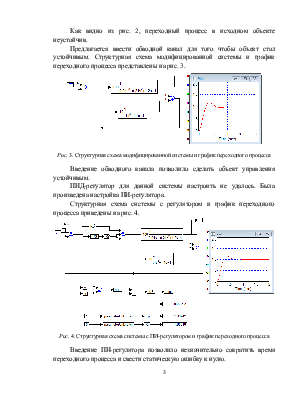
Предлагается ввести обводной канал для того чтобы объект стал устойчивым. Структурная схема модифицированной системы и график переходного процесса представлены на рис. 3.
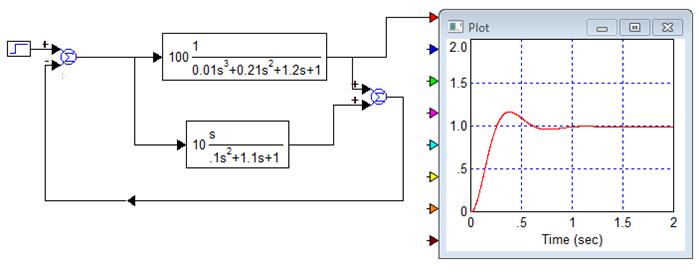
Рис. 3. Структурная схема модифицированной системы и график переходного процесса
Введение обводного канала позволило сделать объект управления устойчивым.
ПИД-регулятор для данной системы настроить не удалось. Была произведена настройка ПИ-регулятора.
Структурная схема системы с регулятором и график переходного процесса приведены на рис. 4.
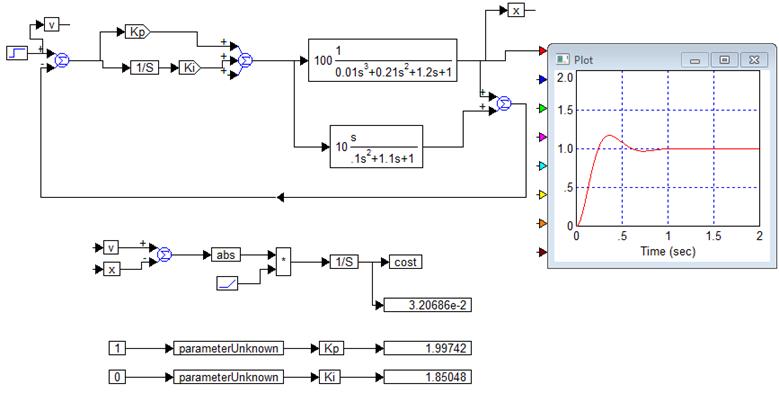
Рис. 4. Структурная схема системы с ПИ-регулятором и график переходного процесса
Введение ПИ-регулятора позволило незначительно сократить время переходного процесса и свести статическую ошибку к нулю.
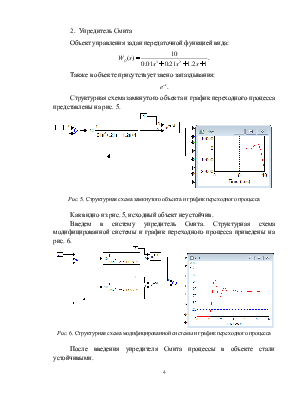
2. Упредитель Смита
Объект управления задан передаточной функцией вида:

Также в объекте присутствует звено запаздывания:
![]()
Структурная схема замкнутого объекта и график переходного процесса представлены на рис. 5.
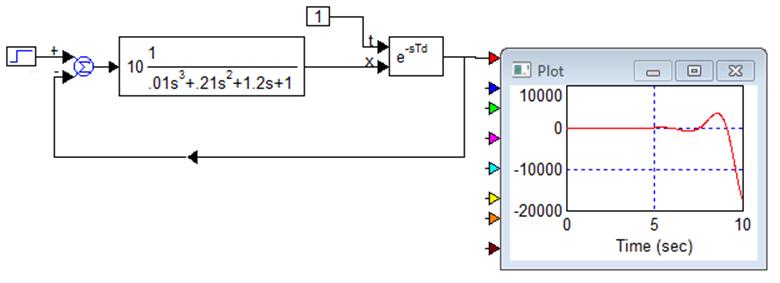
Рис. 5. Структурная схема замкнутого объекта и график переходного процесса
Как видно из рис. 5, исходный объект неустойчив.
Введем в систему упредитель Смита. Структурная схема модифицированной системы и график переходного процесса приведены на рис. 6.
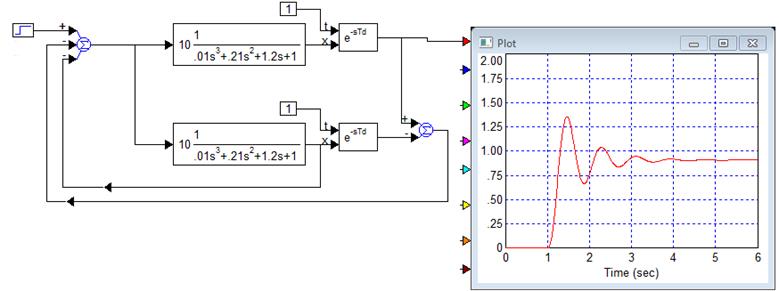
Рис. 6. Структурная схема модифицированной системы и график переходного процесса
После введения упредителя Смита процессы в объекте стали устойчивыми.
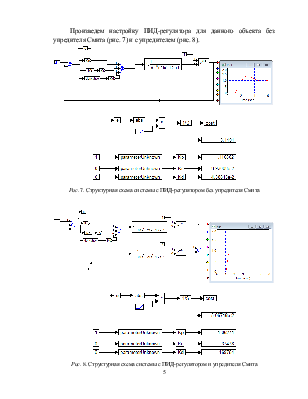
Произведем настройку ПИД-регулятора для данного объекта без упредителя Смита (рис. 7) и с упредителем (рис. 8).
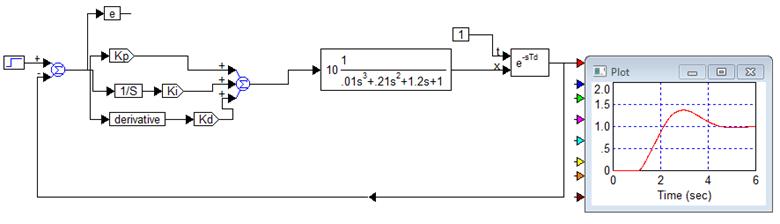
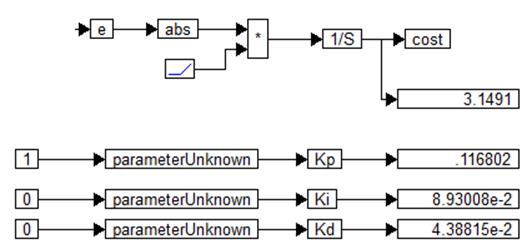
Рис. 7. Структурная схема системы с ПИД-регулятором без упредителя Смита
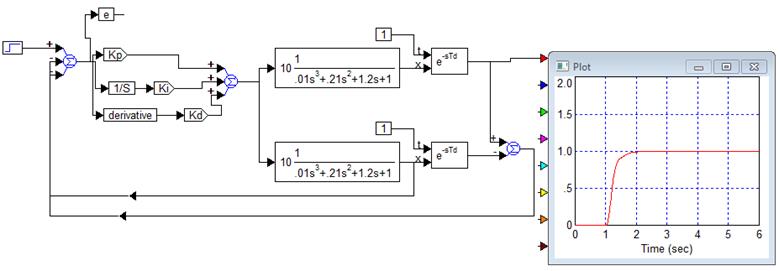
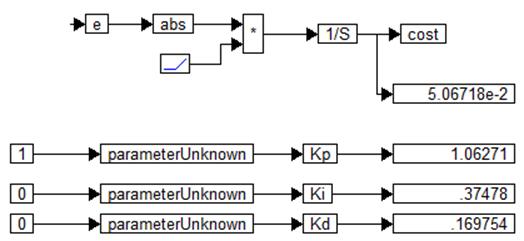
Рис. 8. Структурная схема системы с ПИД-регулятором и упредителя Смита
Сравнивая рисунки 7 и 8, можно сделать вывод о том, что введение в систему упредителя Смита улучшает качество переходного процесса: уменьшается длительность процесса и исключается перерегулирование.
Выводы
Моделирование показало, что применение обводного канала позволяет эффективно обеспечивать устойчивость объекта управления.
Введение упредителя Смита улучшает качество переходных процессов.
Список использованной литературы
1. Жмудь В.А. Моделирование и оптимизация систем управления лазерным излучением в среде VisSim: Учебное пособие/ Новосиб. гос. ун-т. Новосибирск, 2010. 118 с.
2. Основы теории непрерывных и дискретных систем регулирования. – 5-е изд., перераб. и доп.: учебное пособие / А.С. Востриков, Г.А.Французова, Е.Б. Гаврилов. – Новосибирск: Изд-во НГТУ, 2008. 476 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.