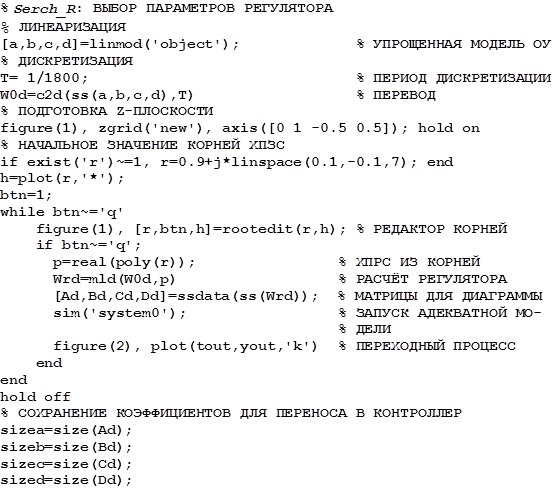
Завершение итерационной процедуры поиска приемлемых корней дискретного регулятора происходит при нажатии на клавиатуре «q», когда на экране находится фигура 1.
4.2. Выбор параметров цифрового регулятора
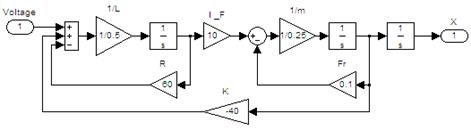
Упрощенная модель КЭМП получена с учетом электромеханических свойств ЭМД в области среднего положения якоря, а также сил сопротивления движению привода. Модель составлена с использованием диапазонов физических величин в системе СИ и показана на рис. 4.2.
|
а |
|
б |
|
Рис. 4.2. Блок-диаграммы упрощенной модели системы электромагнитного привода: а – верхний уровень; б – линейная модель электромеханического преобразования энергии |
Входным сигналом считается среднее напряжение (в вольтах), выходным считается перемещение (в метрах). Коэффициенты модели выбраны как средние значения характеристик в среднем положении якоря и представлены табл. 3.
Таблица 3
|
Блок Gain |
Коэффициент (Gain) |
Размерность |
Описание |
|
1/L |
1/0.5 |
Гн–1 |
Деление на индуктивность |
|
R |
60 |
Ом |
Сопротивление обмотки |
|
I2F |
10 |
Н/А |
Преобразование тока в силу |
|
Kv |
40 |
В×с/м |
Коэффициент скоростной части ЭДС |
|
1/m |
1/0.25 |
кг–1 |
Деление на массу |
|
Fr |
0.1 |
Н×с/м |
Сила трения |
Цифровая часть системы получает и выдает коды. На рис. 4.2, а представлены согласующие коэффициенты физической модели для цифровой части. Диапазон кодов ЦАП составляет −127…127, диапазон изменения питающего напряжения −60…60 В, следовательно, коэффициент преобразования составляет 60/127»1/2 В. Диапазон перемещений составляет 0…4 мм, ему соответствует диапазон кодов АЦП 0…600, коэффициент преобразования составляет 150×103 м–1.
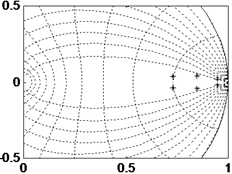
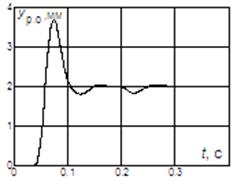
Расположение выбранных корней на круговой диаграмме иллюстрирует рис. 4.3, а вид получаемого переходного процесса – рис. 4.4.
|
|
|
|
Рис. 4.3. Иллюстрация расстановки узлов |
Рис. 4.4. Переходная кривая |
Из последнего рисунка видно, в какой мере удается парировать параметрическое возмущение в электромагнитном приводе с цифровым регулятором. Перенос полученных параметров регулятора на реальный объект позволяет получить переходный процесс, близкий к результатам математического моделирования.
Библиографический список
1. Бесекерский В.А. Теория систем автоматического управления: линейные системы, нелинейные системы, импульсные системы, цифровые и адаптивные системы, критерии. – СПб.: профессия, 2004.
2. Востриков А.С. Синтез нелинейных систем методом локализации. – Новосибирск: Изд-во НГТУ, 1990.
3. Востриков А.С., Французова Г.А. Теория автоматического регулирования: Учеб. пособие. – Новосибирск: Изд-во НГТУ, 2003. − 363 с.
4. Гаврилов Е.Б. Теория автоматического управления. Цифровые системы (Сб. задач для практических занятий): Учеб. пособие. – Новосибирск: Изд-во НГТУ, 1998.− 36 с.
5. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем в MATLAB 6.0: Учеб. пособие. – СПб.: Корона принт, 2001.
6. Герман-Галкин С.Г. Силовая электроника : Лабораторные работы на ПК. – СПб.: Учитель и ученик, Корона принт, 2002.
7. Гультяев А. Визуальное моделирование в среде MATLAB: учебный курс. – СПб.: Питер, 2000.
8. Дьяконов В. MATLAB 6. Учебный курс – СПб.: Питер, 2001.
9. ДьяконовВ. Simulink4. Специальный справочник. – СПб.: Питер, 2003.
10. Иванушкин В.А., Сарапулов Ф.Н., Шымчак П. Структурное моделирование электромеханических систем и их элементов. – Щецин, 2000.
11. Клименко Б.В. Форсированные электромагнитные системы. – М.: Энергоатомиздат, 1989.
12. Кондратьев В.А. Расчет и моделирование средств и систем автоматики в вычислительной среде MatLab: Учеб. пособие / В.А. Кондратьев, А. Л. Соловьев, С. А. Егорова. – Новосибирск: Изд-во НГТУ, 2001. - 61 с.
13. Кондратьев В.А. Проектирование исполнительных электромагнитных двигателей с использованием приемов математического моделирования: Учеб. пособие. – Новосибирск: Изд-во НГТУ, 2002.
14. Лазарев Ю. Моделирование процессов и систем в MATLAB: Учебный курс. – СПб.: Питер; Киев: Издательская группа BHV, 2005.
15. Мартынов Н.Н., Иванов А.П. MATLAB 5.x/ Вычисления, визуализация, программирование – М.: КУДИЦ-ОБРАЗ, 2000.
16. Новгородцев А. Расчет электрических цепей в MATLAB: Учебный курс – СПб.: Питер, 2004.
17. Потемкин В.Г. Система MATLAB. Справочное пособие. – М.: ДИАЛОГ-МИФИ, 1998.
18. Справочная книга по технике автоматического регулирования / Под общ. ред. Дж. Дж. Траксела; Перевод с англ. / под ред. Т. М. Райцына и А. В. Фатеева. – М.; Л.: ГЭИ, 1962.
19. Соловьев А.Л. Параметрический синтез регуляторов в системах с широтно-импульсной модуляцией по методу разделения движений: Автореф. дисс. ... канд. техн. наук. – Новосибирск: Изд-во НГТУ, 2002.
![]()
Компьютерные технологии в расчетах и моделировании средств и систем автоматики
Редактор И.Л. Кескевич
Технический редактор Н.В. Гаврилова
Корректор И.Е. Семенова
Дизайн обложки А.В. Ладыжская
Компьютерная верстка Н.М. Шуваева
Подписано в печать 03.04.2007. Формат 60 х 84 1/16. Бумага офсетная
Тираж 150 экз. Уч.-изд. л. 3,95. Печ. л. 4,25. Изд. № 371. Заказ №
Цена договорная
Отпечатано в типографии
Новосибирского государственного технического университета
![]() 630092, г. Новосибирск, пр. К. Маркса, 20
630092, г. Новосибирск, пр. К. Маркса, 20
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.