

То, что мы знаем, - ограничено, а то,
чего мы не знаем, - бесконечно. (П.С. Лаплас)
2. ЗАДАЧА СИНТЕЗА НЕПРЕРЫВНЫХ АДАПТИВНЫХ СИСТЕМ с моделью
2.1 Постановка задачи адаптивного управления
Рассмотрим класс нелинейных динамических систем, которые описываются уравнениями состояния вида
 (2.1)
(2.1)
где хÎRn , yÎRl , uÎRm , θÎRs - векторы переменных состояния, выходных переменных, управляющих воздействий, параметрических возмущений соответственно (рис. 2.1). Уравнение (2.1) может описывать объект управления вместе с исполнительным и измерительным устройствами. Вектор – функции f, g предполагаются известными, гладкими с ограниченными частными производными,
 , матрица частных производных
, матрица частных производных  должна быть невырожденной. Зависимость f , g от θ
и времени t отражает неопределённость
математической модели и характеристик внешней среды. В реальных условиях
параметрические и аддитивные возмущения ограничены. В некоторых случаях верхние
оценки уровня и темпа изменения возмущений:
должна быть невырожденной. Зависимость f , g от θ
и времени t отражает неопределённость
математической модели и характеристик внешней среды. В реальных условиях
параметрические и аддитивные возмущения ограничены. В некоторых случаях верхние
оценки уровня и темпа изменения возмущений:
![]() (2.2)
(2.2)
считаются известными.
Полагаем, что желаемое поведение системы задано эталонной моделью вида
 (2.4)
(2.4)
где xмÎRn – вектор переменных состояния
модели, yмÎRl – вектор выходных переменных
модели, ![]() - вектор эталонных входных воздействий.
Близость характеристик системы и эталонной модели оценим с помощью
положительной функции Q.
Тогда цель управления зададим в виде неравенства
- вектор эталонных входных воздействий.
Близость характеристик системы и эталонной модели оценим с помощью
положительной функции Q.
Тогда цель управления зададим в виде неравенства
![]() ,
(2.3)
,
(2.3)
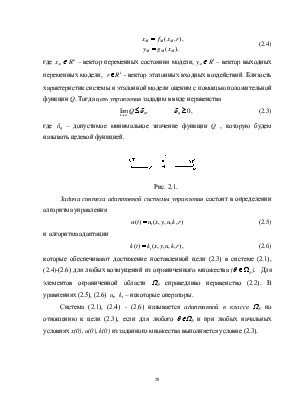
где δq – допустимое минимальное значение функции Q , которую будем называть целевой функцией.
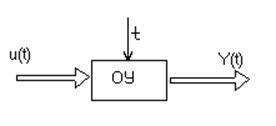
Рис. 2.1.
Задача синтеза адаптивной системы управления состоит в определении алгоритма управления
![]() (2.5)
(2.5)
и алгоритма адаптации
![]() (2.6)
(2.6)
которые обеспечивают достижение
поставленной цели (2.3) в системе (2.1), (2.4)-(2.6) для любых возмущений из
ограниченного множества (![]() ). Для элементов
ограниченной области Wq справедливо неравенство (2.2). В уравнениях (2.5),
(2.6) ut, kt – некоторые операторы.
). Для элементов
ограниченной области Wq справедливо неравенство (2.2). В уравнениях (2.5),
(2.6) ut, kt – некоторые операторы.
Система (2.1), (2.4) - (2.6) называется адаптивной в классе Wq по отношению к цели (2.3), если для любого qÎWqи при любых начальных условиях x(0), u(0), k(0) из заданного множества выполняется условие (2.3).
2.2 Этапы синтеза адаптивной системы
Согласно (2.5), (2.6) адаптивные системы содержат контур, формирующий управление (u) и контур, в котором вырабатываются текущие значения коэффициентов регулятора. Поэтому говорят о двухуровневой структуре адаптивных систем. Подобно любой системе автоматического управления синтез адаптивной системы состоит из общих этапов расчета и этапов, обусловленных двухуровневой структурой:
1. Определение математической модели объекта управления,
2. Проверка устойчивости, управляемости, наблюдаемости по линеаризованной модели исходного квазистационарного объекта,
3. Определение граничных условий (2.2), начальным условий в объекте, а также ресурсных ограничений по управлению,
4. Определение целевой функции (Q),
5. Синтез основного контура (2.5),
6. Синтез контура адаптации (2.6),
7. Проверка устойчивости замкнутой системы.
К этапам, обусловленным двухуровневой структурой системы, относятся синтез основного контура (2.5) и синтез контура адаптации (2.6). Среди существующих методов проектирования регуляторов можно выделить следующие:
1) метод эталонного уравнения (или метод инвариантности). Уравнение закона управления получается из равенства правых частей уравнений эталонной модели и модели объекта управления, разрешенных относительно старших производных выходных переменных или координат состояния;
2) модальный метод; для определения закона управления используется желаемое расположение собственных чисел матрицы системы;
3) методы оптимального управления. Закон управления получается в результате решения задачи оптимизации по управляющему воздействию некоторого обобщённого показателя качества;
4) метод сингулярных возмущений; синтез закона управления выполняется по упрощенной модели системы, которая получается в результате выделения подсистем быстрых и медленных процессов. Закон управления определяется по модели, описывающей подсистему медленных движений.
Кроме того, структура основного контура может быть задана одним из типовых законов управления: пропорциональным, пропорционально - интегральным, пропорционально – дифференциальным или пропорционально – интегрально – дифференциальным.
В результате
применения одного из перечисленных методов получают «идеальный» закон
управления ![]() . Выполнив замену неизвестных
возмущений настраиваемыми коэффициентами, приходят к реальному закону
управления
. Выполнив замену неизвестных
возмущений настраиваемыми коэффициентами, приходят к реальному закону
управления ![]() , который в частном случае может
описываться линейным уравнением
, который в частном случае может
описываться линейным уравнением
![]()
где kх,, kr – матрицы настраиваемых коэффициентов соответствующих размерностей.
Далее определяется вид оператора kt (2.6). В системах прямого адаптивного управления алгоритм настройки коэффициентов регулятора
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.