Вариант №6
Тип двигателя: 2ПН112МГУХЛ4
Технические данные двигателя:[1]
|
|
|
Частота вращения об/мин |
КПД, % |
Сопротивление обмотки при 15о С |
Индуктивность цепи якоря, мГн |
|||
|
|
|
Якоря |
Д.п. |
возбужд |
||||
|
1,5 |
220 |
1500 |
4000 |
70 |
1,77 |
1,55 |
44 |
19,5 |
Момент инерции двигателя равен ![]()
Диапазон регулирования ![]()
Для произведения всех необходимых вычислений следует привести активные сопротивления к рабочей температуре:
Превышение температуры обмоток при установившемся тепловом состоянии ДПТ типа 2ПН соответствует классу изоляции B.
Значения удельных сопротивлений меди при различных температурах берем из справочника [2]:
 - при 15
- при 15![]()
 - при 75
- при 75![]()
Далее найдем значения сопротивлений при рабочей температуре:

![]()
![]()
![]()
Теперь найдем полное сопротивление якорной цепи двигателя:
![]()
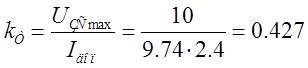
К.П.Д. данного двигателя определено для независимого включения обмотки возбуждения, следовательно, номинальный ток якорной цепи определится по формуле:

Трансформатор в управляемом вентильном электроприводе необходим для согласования напряжения сети с напряжением двигателя.
Фазное напряжение вторичной обмотки трансформатора:

где ![]() коэффициент
запаса по напряжению;
коэффициент
запаса по напряжению; ![]() коэффициент запаса по напряжению,
учитывающий неполное открытие вентилей при максимальном управляющей сигнале;
коэффициент запаса по напряжению,
учитывающий неполное открытие вентилей при максимальном управляющей сигнале; ![]() коэффициент запаса по напряжению,
учитывающий падение напряжения на вентилях и в обмотках трансформатора;
коэффициент запаса по напряжению,
учитывающий падение напряжения на вентилях и в обмотках трансформатора; ![]() - коэффициент, устанавливающий зависимость
между средневыпрямленным напряжением преобразователя и напряжением вторичной
обмотки трансформатора, он зависит от схемы выпрямления.
- коэффициент, устанавливающий зависимость
между средневыпрямленным напряжением преобразователя и напряжением вторичной
обмотки трансформатора, он зависит от схемы выпрямления.
Коэффициент трансформации трансформатора:
Определим токи фаз вторичной и первичной обмоток трансформатора:
![]()

где коэффициенты ![]() и
и ![]() приведены в [2].
приведены в [2].
Типовая мощность трансформатора:
![]()
где ![]() - для
мостовой схемы из таблицы 1 [2].
- для
мостовой схемы из таблицы 1 [2].
Принимаем трансформатор мощностью
![]() .
.
Приведенное ко вторичной обмотке активное сопротивление одной фазы трансформатора:
 ,
,
где ![]() потери
активной мощности трансформатора в режиме короткого замыкания.
потери
активной мощности трансформатора в режиме короткого замыкания.
Реактивное сопротивление одной фазы трансформатора, приведенное ко вторичной обмотке:
 ,
,
где Uк = 5...10 % – напряжение короткого замыкания трансформатора; Zт – полное сопротивление одной фазы трансформатора, приведенного ко вторичной обмотке; Lт = xт/w0 – индуктивность фазы трансформатора; w0 = 2pfс – частота напряжения питающей сети.
Индуктивность фазы трансформатора:

Эквивалентные параметры якорной цепи двигателя:
![]()
![]()
Максимальная средневыпрямленная Э.Д.С.:

Э.Д.С. с учетом ограничения угла регулирования:
![]()
Коэффициент передачи тиристорного преобразователя:
Силовая схема ЭП:
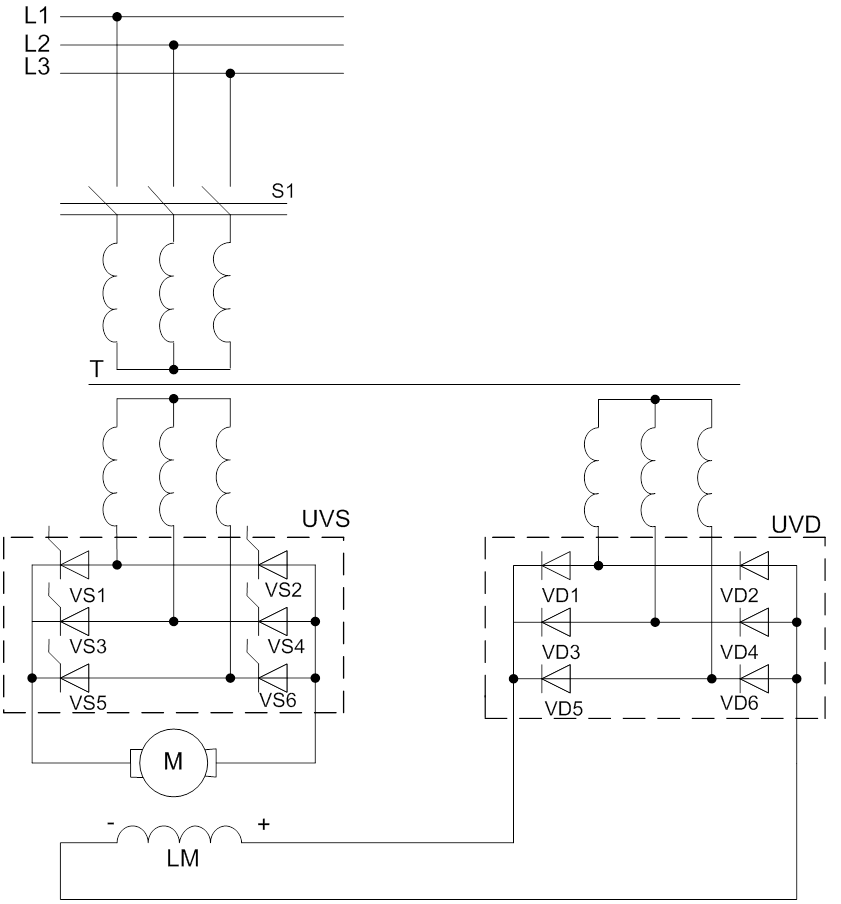
Рисунок 1. Силовая схема электропривода
Обозначения на схеме:
Т-трансформатор; М – ДПТ; LM – обмотка возбуждения двигателя; UVS – группа тиристорных преобразователей; UVD – группа диодных выпрямителей.
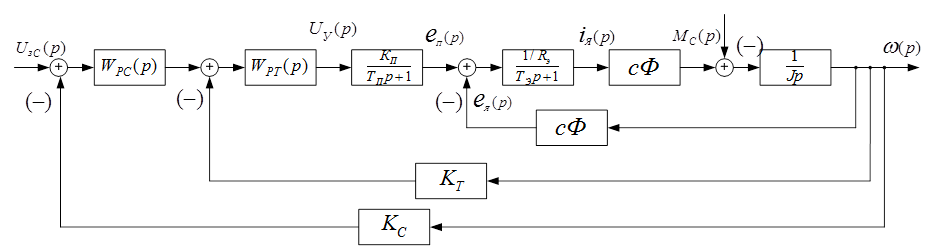
Рисунок 2. Общая структурная схема системы подчиненного регулирования скорости.
Синтез выполняется при двух основных допущениях:
1. Постоянная
времени управляющего преобразователя ![]() достаточно мала и ее
можно принять в качестве малой некомпенсируемой
достаточно мала и ее
можно принять в качестве малой некомпенсируемой ![]() .
.
2. Влияние внутренней обратной связи двигателя по Э.Д.С. вращения мало или скомпенсировано.
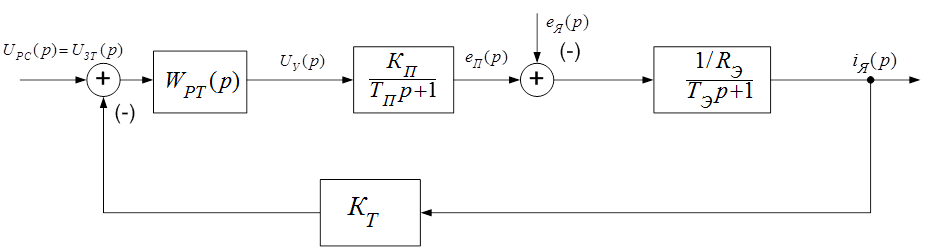
Рисунок 3. Структурная схема контура регулирования тока
Определение коэффициента обратной связи по току:
 (Ом)
(Ом)
где ![]()
Внутренним контуром в системе подчиненного регулирования скорости тиристорного электропривода является контур тока. Оптимизация параметров контура тока проводится при следующих допущениях:
1. режим тока якорной цепи двигатель–преобразователь непрерывный;
2. тиристорный преобразователь является звеном, передаточная функция которого:
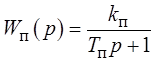 ,
,
где Тп = (0.01...0.008) с – постоянная времени системы управления преобразователем;
При синтезе регуляторов каждого из контуров СПР задаются желаемыми характеристиками скорректированного контура. В данном случае применим настройку на технический оптимум (оптимизацию по модулю).
Запишем передаточную функцию разомкнутого контура регулирования тока:

Исходя, из условия настройки на технический оптимум:
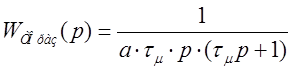
Таким образом, получаем:

Подставим в данные выражения все известные величины:


где ![]() -
электромагнитная постоянная времени якорной цепи, a =2 – настроечный коэффициент.
-
электромагнитная постоянная времени якорной цепи, a =2 – настроечный коэффициент.
Принципиальная схема регулятора тока на операционном усилителе:
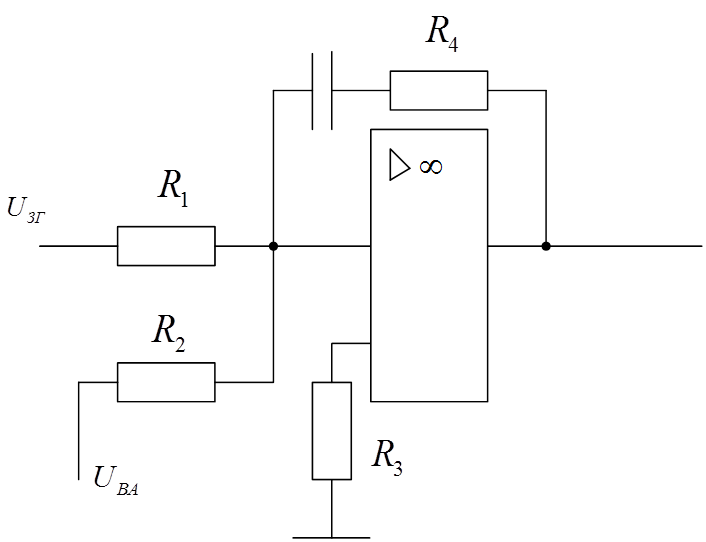
Рисунок 4. Принципиальная схема регулятора тока на ОУ
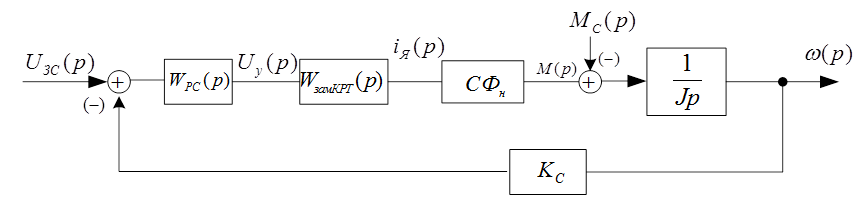
Рисунок 5. Структурная схема контура регулирования скорости
При синтезе принимаем следующие допущения:
·
Электропривод однозонный ![]()
· При
синтезе регулятора скорости передаточная функция замкнутого контура тока с
достаточной степенью точности (ввиду малости некомпенсируемой постоянной
времени ![]() ) аппроксимируется
выражением:
) аппроксимируется
выражением:

Тогда нeкoмпeнcиpyемoй малой постоянной времени в контуре скорости является величина
![]() (с)
(с)
Настройка на ТО:
 ,
,
где J=0.015![]() - момент инерции якоря ДПТ.
- момент инерции якоря ДПТ.
 ,
,
где  (Вб),
(Вб),
 -
номинальная частота вращения двигателя,
-
номинальная частота вращения двигателя,
 -
коэффициент обратной связи по току,
-
коэффициент обратной связи по току,
![]() -
напряжение задающего сигнала.
-
напряжение задающего сигнала.
Принципиальная схема РТ на ОУ:
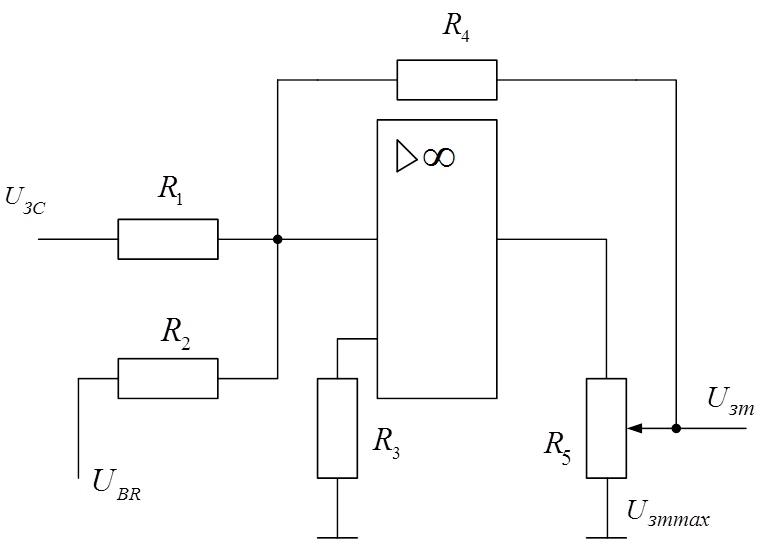
Рисунок 6. Принципиальная схема РС на базе ОУ
Запишем скоростную характеристику:

По скоростной характеристике определяем значение ![]() для номинального режима:
для номинального режима:

 - электромеханическая постоянная времени
ЭП.
- электромеханическая постоянная времени
ЭП.
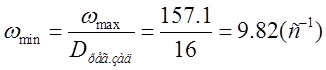
Далее определим минимальную частоту вращения:
Построим график:
Рассчитаем, какой диапазон регулирования удается достичь при заданной погрешности:

 - статическая просадка скорости.
- статическая просадка скорости.
Для нижней характеристики определим статическую погрешность регулирования:
Можно сделать вывод, что контур регулирования скорости надо настраивать не на технический (ТО), а на симметричный оптимум (СО).

Рисунок 6. Структурная схема контура регулирования скорости при настройке на СО
Синтез регулятора скорости:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




