Реверсивные преобразователи и непосредственные преобразователи частоты.
Реверсивными называются преобразователи, позволяющие изменять полярность постоянного напряжения и тока в нагрузке. Реверсивные преобразователи используются, главным образом в электроприводе для изменения направления вращения двигателей постоянного тока.
Структурная схема реверсивного выпрямителя приведена на рис. 1.1. Преобразователь состоит из двух вентильных комплектов ВК1и ВК2 , подключённых к нагрузке встречно- параллельно. Каждый из комплектов может быть построен на основе любой рассмотренной схемы управляемых выпрямителей. При работе
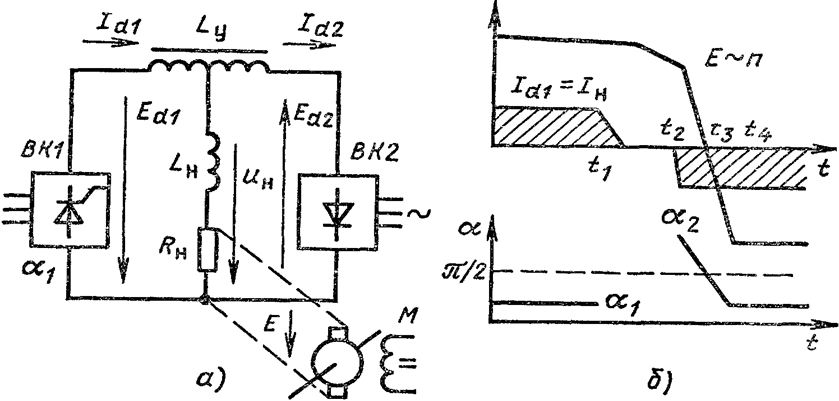
Рис. 1. Реверсивный преобразователь (а) и диаграммы токов и напряжения в нагрузке и углов управления комплектов при реверсе (б)
ВК1 ток в нагрузке протекает в положительном направлении. При работе ВК2 полярность тока изменяется на противоположную.
В зависимости от способа управления вентильными комплектами реверсивные преобразователи бывают двух видов:
1. Реверсивные преобразователи с раздельным управлением, при котором управляющие импульсы приходят только на один из комплектов, проводящих ток. Импульсы управления в этот момент на второй комплект не попадают и его вентили заперты. Реактор Ly в схеме может отсутствовать.
2.
![]()
![]() Реверсивные преобразователи с согласованным управлением, при
котором импульсы управления поступают одновременно на вентили обоих вентильных
комплектов с определённым согласованным углом управления:
Реверсивные преобразователи с согласованным управлением, при
котором импульсы управления поступают одновременно на вентили обоих вентильных
комплектов с определённым согласованным углом управления: ![]() , где и углы управления ВК1 и ВК2
соответственно. В схеме рис. 1 имеется реактор Ly
, где и углы управления ВК1 и ВК2
соответственно. В схеме рис. 1 имеется реактор Ly
Рассмотрим работу реверсивного преобразователя с раздельным управлением предположив что нагрузкой вместо R является двигатель постоянного тока M с независимым возбуждением.
При отпирании ВК1 (![]() <90°)
полярность напряжения и направление тока соответствуют указанным на рис. 1, а.
Для реверсирования тока в момент t1 (рис.1, 6) снимаем импульсы управления с ВК1. При
этом ток iH спадает до нуля со скоростью, определяемой индуктивностью
сглаживающего дросселя LH. Спустя время паузы, достаточное для прекращения тока n, при
t=t2 подаем
отпирающие импульсы на ВК2 с углом управления
<90°)
полярность напряжения и направление тока соответствуют указанным на рис. 1, а.
Для реверсирования тока в момент t1 (рис.1, 6) снимаем импульсы управления с ВК1. При
этом ток iH спадает до нуля со скоростью, определяемой индуктивностью
сглаживающего дросселя LH. Спустя время паузы, достаточное для прекращения тока n, при
t=t2 подаем
отпирающие импульсы на ВК2 с углом управления ![]() >90°.
В силу инерции двигателя с нагрузкой частота вращения n и напряжение на якоре Е
за время паузы практически не изменяются. Так как при
>90°.
В силу инерции двигателя с нагрузкой частота вращения n и напряжение на якоре Е
за время паузы практически не изменяются. Так как при ![]() >90°
BK2 работает в инверторном режиме,
двигатель переходит в генераторный режим, т. е. выступает в роли источника
энергии. Ток Id2 BK2 создает в машине
тормозной момент, что приводит к быстрому снижению скорости n и ЭДС в цепи
якоря Е. Торможение двигателя с возвратом в питающую сеть энергии,
запасенной во вращающихся массах, называется рекуперативным. Скорость
убывания угла управления
>90°
BK2 работает в инверторном режиме,
двигатель переходит в генераторный режим, т. е. выступает в роли источника
энергии. Ток Id2 BK2 создает в машине
тормозной момент, что приводит к быстрому снижению скорости n и ЭДС в цепи
якоря Е. Торможение двигателя с возвратом в питающую сеть энергии,
запасенной во вращающихся массах, называется рекуперативным. Скорость
убывания угла управления ![]() при торможении часто
выбирают такой, чтобы инвертирование в условиях снижающегося Е
проходило при номинальном токе Id2.
при торможении часто
выбирают такой, чтобы инвертирование в условиях снижающегося Е
проходило при номинальном токе Id2.
При t=t3 угол управления ![]() =90°, скорость n=0, E==0, т.
е. двигатель останавливается. Продолжая уменьшать
=90°, скорость n=0, E==0, т.
е. двигатель останавливается. Продолжая уменьшать ![]() ,
разгоняем двигатель до номинальной скорости в противоположном направлении
(момент t4). При этом BK2 работает в выпрямительном режиме и
полярность выходного напряжения изменяется на обратную.
,
разгоняем двигатель до номинальной скорости в противоположном направлении
(момент t4). При этом BK2 работает в выпрямительном режиме и
полярность выходного напряжения изменяется на обратную.
Для торможения двигателя теперь надо снять импульсы
управления с BK2 и, выждав паузу, включить ВК1 в инверторном
режиме при ![]() >90°. На интервалах 0—t1 (рис. 1,6) ВК1
работает в выпрямительном
>90°. На интервалах 0—t1 (рис. 1,6) ВК1
работает в выпрямительном
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.