Признаком задания СК в программе MUSTANG является cosφном=0.
Синхронный двигатель (СД).
Уравнения СД отличаются от уравнений генератора следующим:
1) вместо слагаемого РT/(1+s) в уравнении движения ротора используется уравнение для момента сопротивления СД:
![]()
(c учетом дополнительного момента трогания Мтрог)
где:
mст -статический момент сопротивления,
Рнорм -активная мощность в исходном режиме [МВт],
2) выбег ротора СД ограничивается условием: ωR больше или равно нулю,
3) в модели с учетом электромагнитных переходных процессов в роторе приближенно учитывается вытеснение тока в демпферных контурах СД. Последнее осуществляется заменой в уравнениях СМ величин T"d0и T"q0 на T"d0/К и T"q0/К, соответственно. Большей степени вытеснения тока соответствует увеличение коэффициента вытеснения тока К. В общем случае К = К(s'), где: s' = sU - s.
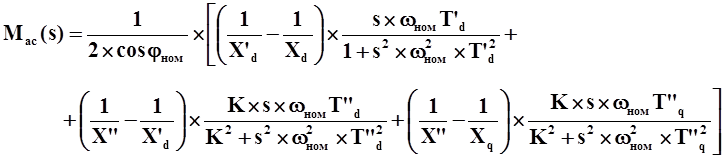
Значения К определяются на основании информации об асинхронной характеристике СД: Мас = f(s) при U = Uном.
Если характеристика Мас(s) не задана, то К = 1.
Если задан только пусковой момент Мас(100%), то
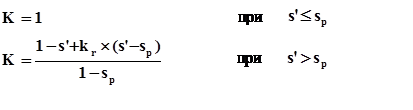
здесь:

mП кратность пускового момента СД по отношению к его номинальному моменту,
|
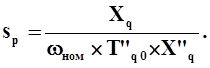
sр расчетное скольжение, которое либо задается, либо по умолчанию принимается равным,
Если характеристика Мас(s) задана для ряда значений s, то коэффициенты К(s) выбираются так, чтобы получить наилучшее возможное приближение асинхронной характеристики в математической модели СД
к заданным значениям Мас(s) c линейной интерполяцией К(s) в промежуточных точках.
На экран выдаются рассчитанные значения К и те значения Мас(s), которые соответствуют этим К.
Примечания:
1. Значения К < 1 при заданной асинхронной характеристике свидетельствуют о неудачно заданных Т"d0 и Т"q0. Если рассчитанные значения Мас(s) существенно меньше заданных, то это обычно свидетельствует о завышенном значении Х" или о неудачно заданных Т"d0 и Т"q0,
2. Задание Мас(s) с определением коэффициентов К требуется только для расчетов асинхронных режимов возбуждённых или невозбуждённых СД (после нарушения их устойчивости или при пуске СД).
2.1.2. Системы возбуждения и АРВ.
Уравнения системы возбуждения (СВ) и уравнения АРВ образуют единый блок и основаны на следующих допущениях:
1) малые постоянные времени в СВ и АРВ не учитываются или учитываются упрощенно,
2) не учитывается ряд второстепенных эффектов: нелинейность передаточных функций (эти функции заменяются на линейные с ограничениями), кратковременное снижение Eqe при близком к.з. в высокочастотной СВ (соответственно, увеличивается постоянная времени СВ) и другие,
3) упрощенно записываются уравнения высокочастотной СВ и блока сильной стабилизации (БСС),
4) упрощенно учитывается действие ограничителя минимального возбуждения (ОМВ),
5) при описании СВ и АРВ вместо тока if в обмотке возбуждения используется э.д.с. Eq.
Уравнения составлены таким образом, что они пригодны для описания всех существующих СВ и АРВ (при условии соответствующего задания параметров).Предусмотрена возможность моделирования следующих типов СВ генераторов и СК:
тип 1: независимое тиристорное возбуждение, или тиристорная система возбуждения с сериесными трансформаторами, или бесщеточная СВ с вращающимися тиристорами; АРВ сильного действия (АРВСД);
тип 2: тиристорное самовозбуждение без сериесных трансформаторов; АРВСД;
тип 3: бесщёточная СВ с вращающимися диодами; АРВСД;
тип 4: высокочастотная СВ без блока сильной стабилизации (БСС); АРВ типа корректора напряжения;
тип 5: то же, но с БСС;
тип 6: электромашинное возбуждение с возбудителем постоянного тока; компаундирование и корректор напряжения; релейная форсировка напряжения;
тип 0: отсутствие АРВ, Eqe = const.
Предусмотрена возможность управления действием АРВ от автоматики и моделирование ряда отказов АРВ и СВ (см. ниже).
 Уравнения СВ
и АРВ генераторов и СК:
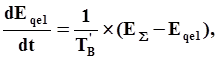
Уравнения СВ
и АРВ генераторов и СК:
![]()
где:
ΔuРВ выходной сигнал первого сумматора сигналов АРВ,
K0U, K1U, K1if, K0f, K1f коэффициенты регулирования,
U0 уставка АРВ по напряжению, равная напряжению генератора в исходном режиме,
![]() α коэффициент,
позволяющий учесть изменение уставки по напряжению в корректорах напряжения от
частоты,
α коэффициент,
позволяющий учесть изменение уставки по напряжению в корректорах напряжения от
частоты,
sUt скольжение вектора напряжения используемое для формирования сигнала по отклонению частоты от предшествующего значения:
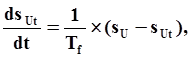
Tf постоянная времени в канале отклонения частоты,
Uдоп.1 дополнительный сигнал, позволяющий обеспечить специфическое воздействие на работу АРВ (от противоаварийной автоматики, или при моделировании неправильной работы АРВ); управление величиной Uдоп.1 осуществляется дискретно: значение Uдоп.1, введенное по правилам моделирования противоаварийной автоматики, сохраняется до нового управления;
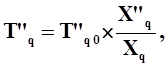
![]() Eqe0 э.д.с.
возбуждения в исходном режиме:
Eqe0 э.д.с.
возбуждения в исходном режиме:
uPВmin, uРВmaxограничения входного сигнала ΔuРВ на АРВ.
где:
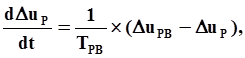
TРВпостоянная времени, собственно, регулятора возбуждения,
ΔuP выходной сигнал АРВ.
![]()
где:
KI, Kif коэффициенты регулирования,
ΔUf сигнал на форсировку и расфорсировку возбуждения:
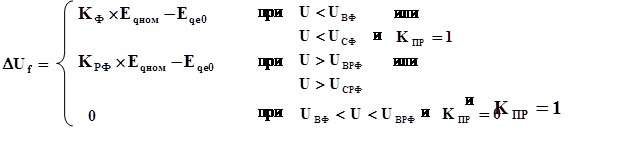 |
КПР признак ввода форсировки или расфорсировки возбуждения (КПР=1) или отсутствия ввода форсировки или расфорсировки возбуждения (КПР=0),
UВФ напряжение ввода форсировки возбуждения,
UСФ напряжение снятия форсировки возбуждения,
UВРФ напряжение ввода расфорсировки возбуждения,
UСРФ напряжение снятия расфорсировки возбуждения,
 |
КРФ кратность сигнала на расфорсировку возбуждения,
Uдоп.2 дополнительнй входной сигнал (аналогично Uдоп.1).
![]()
где:
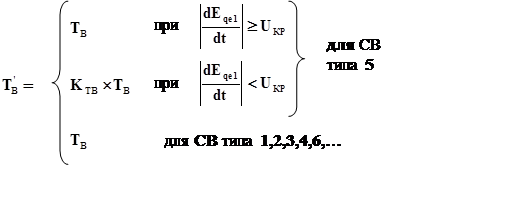
ТВ постоянная времени СВ,
 КТВ кратность
увеличения постоянной времени СВ при действии БСС,
КТВ кратность
увеличения постоянной времени СВ при действии БСС,
UКР наименьшее значение при котором блокируется действие БСС,
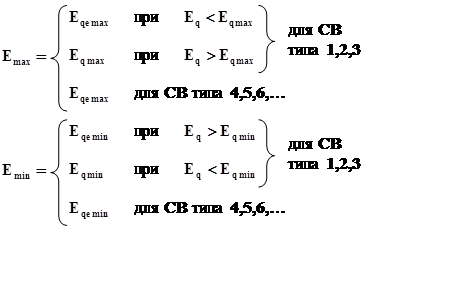
Eqemin, Eqemaxзначения э.д.с. Eqe, соответствующие ограничениям напряжения возбуждения,
Eqmin, Eqmax значения э.д.с. Eq, соответствующие ограничениям тока возбуждения (ОМВ и потолок возбуждения),
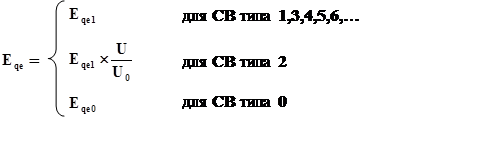
Eqe1 э.д.с. равная Eqe, для всех СВ, кроме типа 2; в случае типа 2 э.д.с. Eqe1 соответствует напряжению возбуждения, которое было бы при U=U0:
Предусмотрена возможность управления величиной Eqemax и Eqemin аналогично управлению величинами Uдоп.1 и U доп.2. Например, при потере возбуждения Eqemax = Eqemin = 0. При действии ограничителя перегрузки ротора (ОП): Eqemax=(0.9¸1.0)´Eqном.
Коэффициенты регулирования задаются в системе относительных единиц
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.