


Новосибирский государственный технический университет
по дисциплине
«Электромеханические системы»
на тему
«Автоматизированный электропривод подъемной тележки»
|
Факультет: |
МТ |
|
Группа: |
КП-02 |
|
Студент: |
Андросенко Ю.А. |
|
Преподаватель: |
Путинцев Н.Н. |
Вариант 1- 10
Новосибирск – 2003г.
Исходные данные
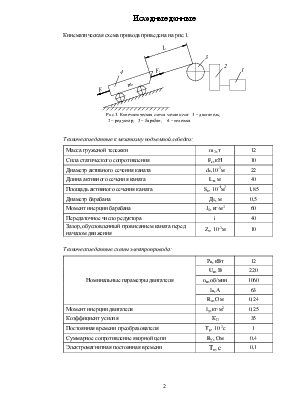
Кинематическая схема привода приведена на рис.1.
|
Технические данные к механизму подъемной лебедки:
|
Масса груженой тележки |
m2, т |
12 |
|
Сила статического сопротивления |
Fс, кН |
10 |
|
Диаметр активного сечения каната |
dк,10-3м |
22 |
|
Длина активного сечения каната |
Lк, м |
40 |
|
Площадь активного сечения каната |
Sк, 10-4м2 |
1,85 |
|
Диаметр барабана |
Дб, м |
0,5 |
|
Момент инерции барабана |
Jб, кг×м2 |
60 |
|
Передаточное число редуктора |
i |
40 |
|
Зазор, обусловленный провисанием каната перед началом движения |
Zx, 10-3м |
10 |
Технические данные схемы электропривода:
|
Номинальные параметры двигателя |
Рн, кВт |
12 |
|
Uн, В |
220 |
|
|
nн, об/мин |
1060 |
|
|
Iн, А |
63 |
|
|
Rя, Ом |
0,24 |
|
|
Момент инерции двигателя |
Iд, кг×м2 |
0,25 |
|
Коэффициент усилия |
КП |
35 |
|
Постоянная времени преобразователя |
Тm, 10-2с |
1 |
|
Суммарное сопротивление якорной цепи |
Rå, Ом |
0,4 |
|
Электромагнитная постоянная времени |
Тя, с |
0,1 |
Расчет параметров регуляторов системы подчиненного регулирования
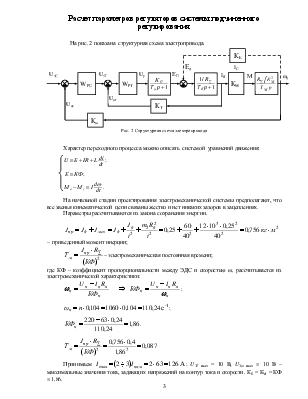
 На рис. 2 показана структурная схема
электропривода.
На рис. 2 показана структурная схема
электропривода.
Рис. 2. Структурная схема электропривода
Характер переходного процесса можно описать системой уравнений движения:
![]()
![]() ;
;
![]() ;
;
![]() .
.
На начальной стадии проектирования электромеханической системы предполагают, что все звенья кинематической цепи связаны жестко и нет никаких зазоров в зацеплениях.
Параметры рассчитываются из закона сохранения энергии.
 – приведенный момент инерции;
– приведенный момент инерции;
 – электромеханическая постоянная времени;
– электромеханическая постоянная времени;
где КФ – коэффициент пропорциональности между ЭДС и скоростью w, рассчитывается из электромеханической характеристики:
 ;
;
![]() ;
;
 .
.
Принимаем ![]() ; UЗТ max = 10 В, UЗw max
= 10 В – максимальные значения тока, задающих напряжений на контур тока и
скорости. КЕ = КМ = КФ = 1,86.
; UЗТ max = 10 В, UЗw max
= 10 В – максимальные значения тока, задающих напряжений на контур тока и
скорости. КЕ = КМ = КФ = 1,86.
В соответствии с методикой синтеза системы подчиненного регулирования тока с настройкой на технический оптимум передаточные функции регуляторов определяются выражениями:
 – передаточная функция регулятора скорости;
– передаточная функция регулятора скорости;
Значения коэффициентов обратных связей по току и скорости определяем из отношений
 ;
;  .
.

 – передаточная функция регулятора тока, где ТЯ –
электромагнитная постоянная времени;
– передаточная функция регулятора тока, где ТЯ –
электромагнитная постоянная времени;
 .
.
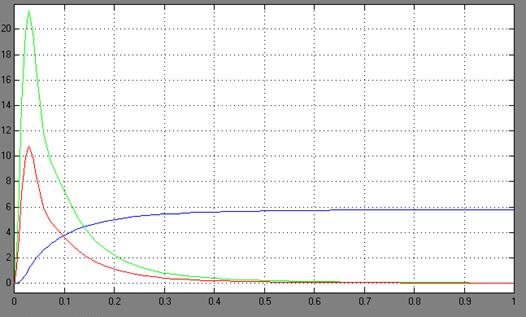
Рис. 3. – ПП по скорости, моменту и току при входном напряжении 1 В, время моделирования 1 с
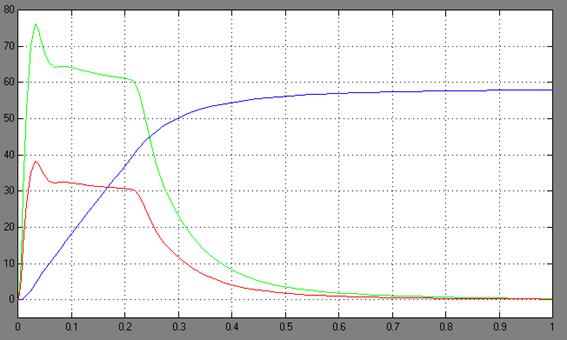
Рис. 4. – ПП по скорости, моменту и току при входном напряжении 10 В, время моделирования 1 с.
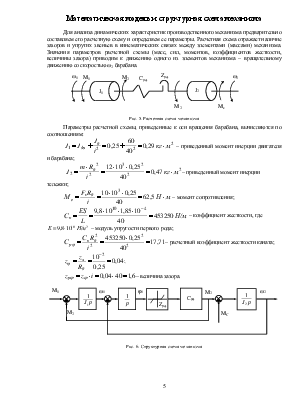
Для анализа динамических характеристик производственного механизма предварительно составляем его расчетную схему и определяем ее параметры. Расчетная схема отражает наличие зазоров и упругих звеньев в кинематических связях между элементами (массами) механизма. Значения параметров расчетной схемы (масс, сил, моментов, коэффициентов жесткости, величины зазора) приводим к движению одного из элементов механизма – вращательному движению со скоростью w2 барабана.
 |
Рис. 5. Расчетная схема механизма
Параметры расчетной схемы, приведенные к оси вращения барабана, вычисляются по соотношениям:
 – приведенный момент инерции двигателя и
барабана;
– приведенный момент инерции двигателя и
барабана;
 –
приведенный момент инерции тележки;
–
приведенный момент инерции тележки;
 –
момент сопротивления;
–
момент сопротивления;
 –
коэффициент жесткости, где
–
коэффициент жесткости, где ![]() – модуль упругости
первого рода;
– модуль упругости
первого рода;
 –
расчетный коэффициент жесткости каната;
–
расчетный коэффициент жесткости каната;
 ;
;
![]() –
величина зазора.
–
величина зазора.
 |
Рис. 6. Структурная схема механизма
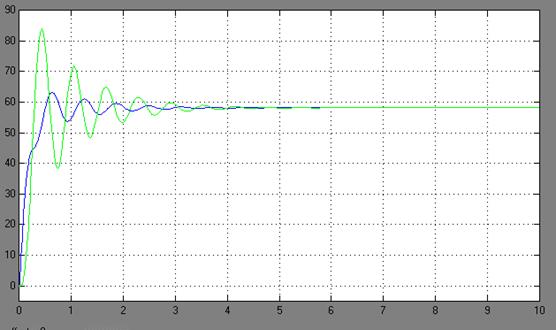
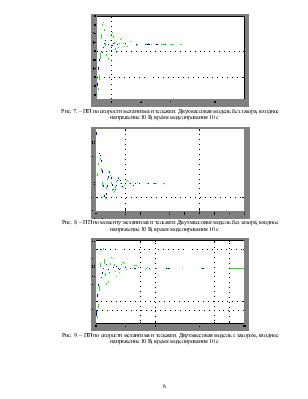
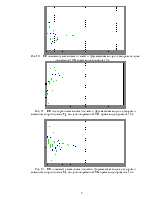
Рис. 7. – ПП по скорости механизма и тележки. Двухмассовая модель без зазора, входное напряжение 10 В, время моделирования 10 с
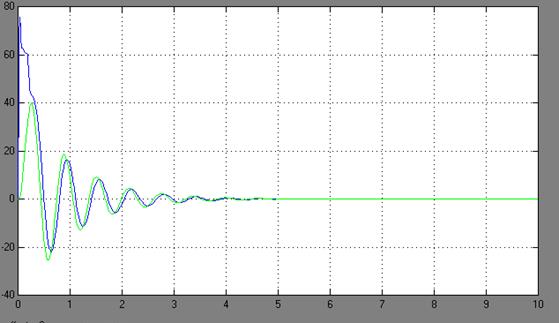
Рис. 8. – ПП по моменту механизма и тележки. Двухмассовая модель без зазора, входное напряжение 10 В, время моделирования 10 с
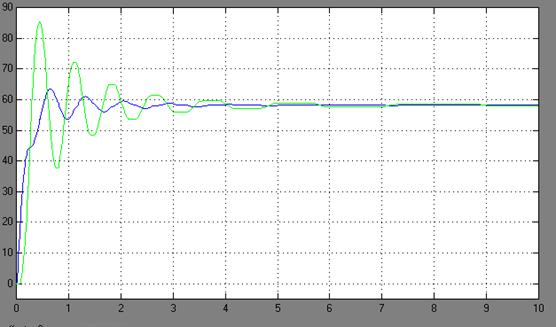
Рис. 9. – ПП по скорости механизма и тележки. Двухмассовая модель с зазором, входное напряжение 10 В, время моделирования 10 с
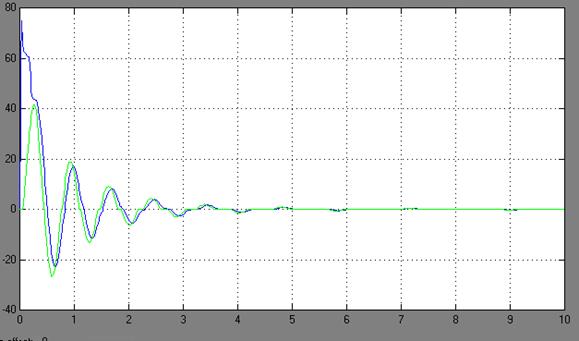
Рис. 10. – ПП по моменту механизма и тележки. Двухмассовая модель с зазором, входное напряжение 10 В, время моделирования 10 с
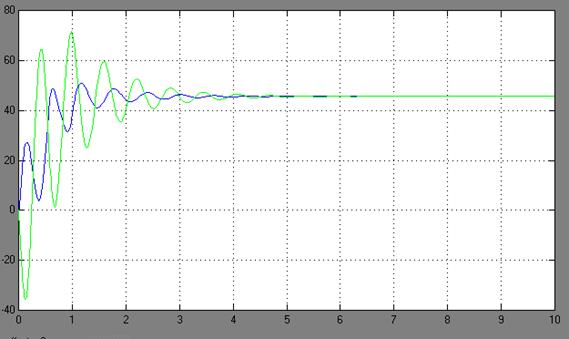
Рис. 11. – ПП по скорости механизма и тележки. Двухмассовая модель с зазором и моментом сопротивления Мс, входное напряжение 10 В, время моделирования 10 с
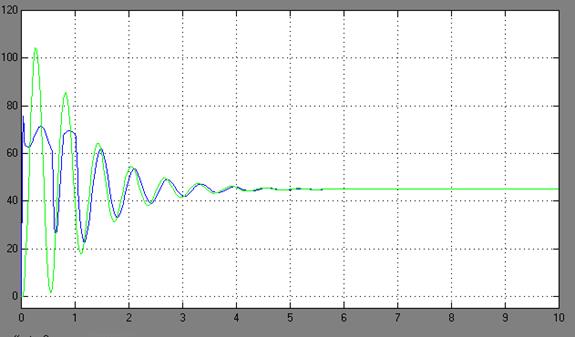
Рис. 12. – ПП по моменту механизма и тележки. Двухмассовая модель с зазором и моментом сопротивления Мс, входное напряжение 10 В, время моделирования 1,2 с
При рассмотрении графиков переходных процессов электромеханической системы можно увидеть, что по сравнению с одномассовой моделью (идеализированной), которая имеет плавные не колебательные переходные процессы, двухмассовая модель (реальная) имеет колебательный переходной процесс. Это обусловлено тем, что двухмассовая модель предусматривает наличие упругой нежесткой связи, зазора и момента сопротивления. На графиках переходных процессов системы с наличием зазора колебания происходят с задержкой по времени, то есть на данных временных промежутках происходит «выборка» зазора. Причем, с учетом момента сопротивления амплитуда и частота колебаний возрастает, что ведет к ухудшению переходного процесса.
Для стабильной работы системы вводим ограничение по току, которое предохраняет систему от возрастания тока больше его предельного значения.
Предложенный метод синтеза регуляторов скорости и тока нас не удовлетворяет т.к. система находится на границе устойчивости. Для решения этой проблемы необходимо применять другие методы синтеза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.