



















Министерство образования Республики Беларусь
Белорусская государственная политехническая академия
Кафедра: “ЭАПУ и ТК”
На тему: “Проектирование управляемого преобразователя энергии с датчиками координат реверсивного электропривода”
|
Выполнила: |
Ажеронок О.Н., гр. 107618 |
|
Руководитель: |
Гульков Г.И. |
Минск
2001
Содержание................................................................................................... 2
1. Проектирование функциональной схемы АЭП...................................... 3
2. Разработка имитационной модели в системе MatLab............................. 5
2.1. Описание блоков схемы моделирования............................................. 6
2.1.1. СИФУ.................................................................................................. 6
2.1.2. Полупроводниковые приборы......................................................... 10
2.1.3. Двигатель постоянного тока............................................................ 12
2.2. Разработка имитационной модели...................................................... 15
2.2.1. Имитационная модель...................................................................... 15
2.2.2. Устранение ошибок.......................................................................... 18
3. Имитационное моделирование установившихся режимов работы АЭП..................................................................................................................... 27
4. Проектирование принципиальных схем и расчет параметров датчиков координат АЭП.......................................................................................... 28
Литература.................................................................................................. 31
В данной работе осуществляется проектирование управляемого преобразователя энергии с датчиками координат реверсивного электропривода.
В качестве преобразователя используется однофазный полууправляемый выпрямитель.
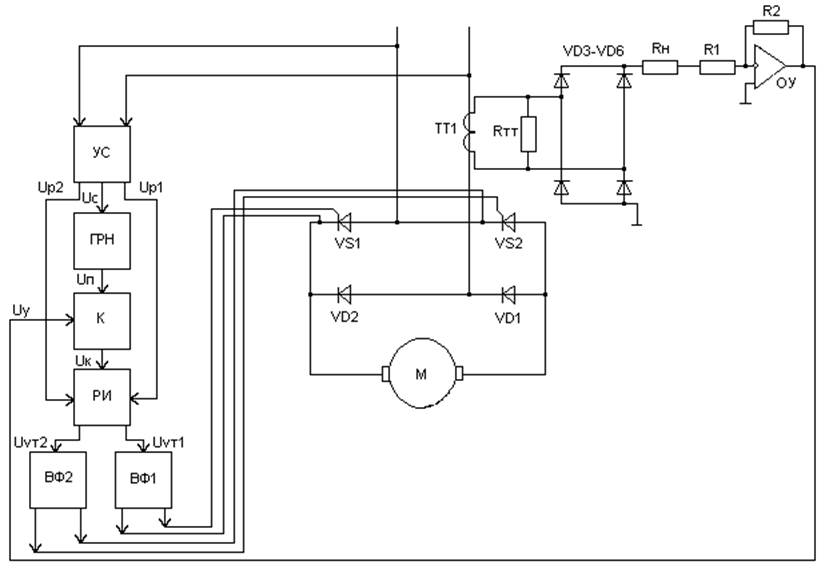
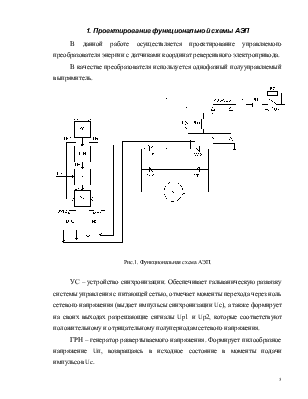
Рис.1. Функциональная схема АЭП.
УС – устройство синхронизации. Обеспечивает гальваническую развязку системы управления с питающей сетью, отмечает моменты перехода через ноль сетевого напряжения (выдает импульсы синхронизации Uс), а также формирует на своих выходах разрешающие сигналы Up1 и Uр2, которые соответствуют положительному и отрицательному полупериодам сетевого напряжения.
ГРН – генератор развертываемого напряжения. Формирует пилообразное напряжение Uп, возвращаясь в исходное состояние в моменты подачи импульсов Uc.
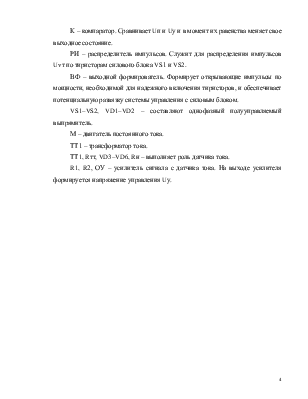
К – компаратор. Сравнивает Uп и Uу и в момент их равенства меняет свое выходное состояние.
РИ – распределитель импульсов. Служит для распределения импульсов Uvт по тиристорам силового блока VS1 и VS2.
ВФ – выходной формирователь. Формирует открывающие импульсы по мощности, необходимой для надежного включения тиристоров, и обеспечивает потенциальную развязку системы управления с силовым блоком.
VS1–VS2, VD1–VD2 – составляют однофазный полууправляемый выпрямитель.
М – двигатель постоянного тока.
ТТ1 – трансформатор тока.
ТТ1, Rтт, VD3–VD6, Rн – выполняет роль датчика тока.
R1, R2, ОУ – усилитель сигнала с датчика тока. На выходе усилителя формируется напряжение управления Uу.
Под имитационной моделью подразумевают математическую модель, которая воспроизводит логику функционирования исследуемой системы при различных сочетаниях значений параметров системы и внешних воздействий.
Проектирование управляемого преобразователя энергии осуществим в системе моделирования MatLab Simulink. Схема преобразователя – однофазный полууправляемый выпрямитель. Схема моделирования представлена на рис. 2.
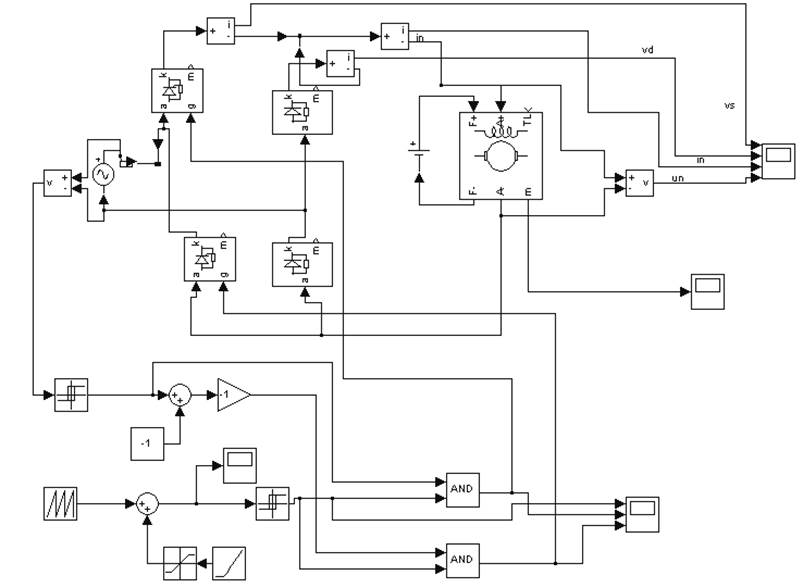
Рис. 2. Схема моделирования.
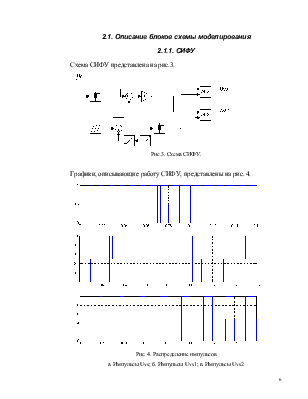
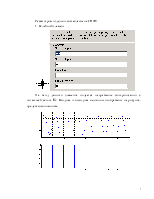
Схема СИФУ представлена на рис.3.
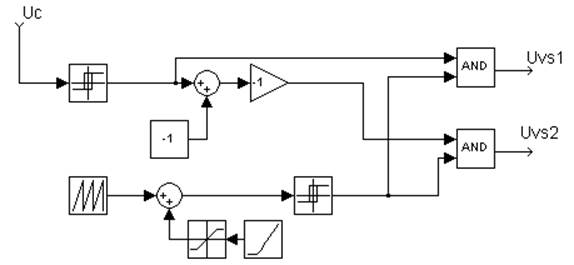
Рис.3. Схема СИФУ.
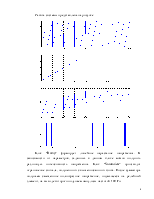
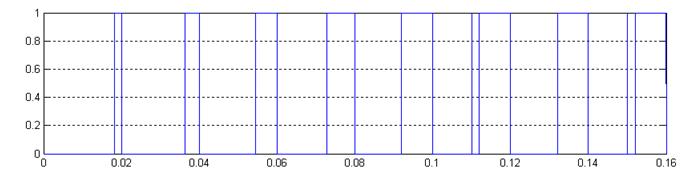
Графики, описывающие работу СИФУ, представлены на рис. 4.
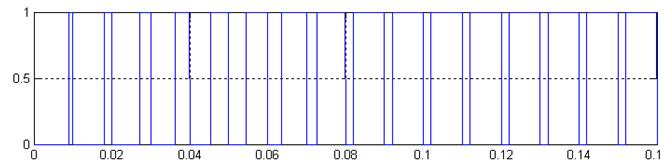
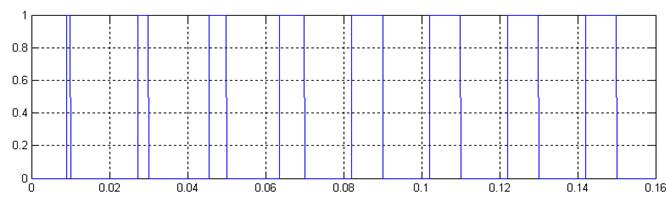
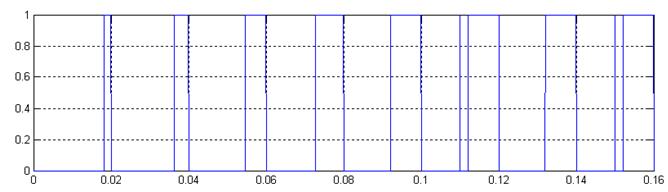
Рис. 4. Распределение импульсов
а. Импульсы Uvs; б. Импульсы Uvs1; в. Импульсы Uvs2
Рассмотрим отдельно составляющие СИФУ.
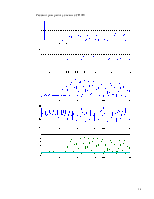
1. Релейный элемент

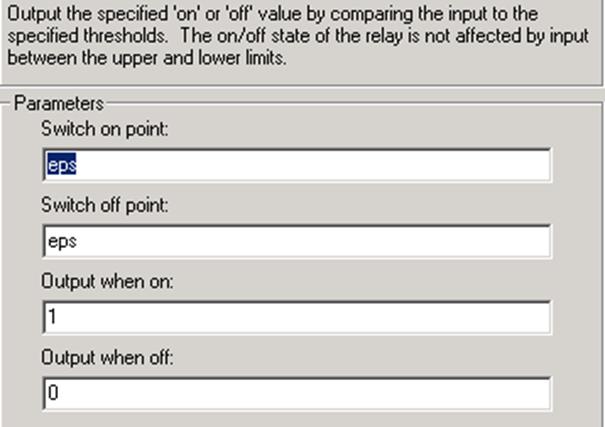
На вход данного элемента подается напряжение синхронизации с питающей сетью Uc. Входная и выходная величины изображены на рисунке, представленном ниже.
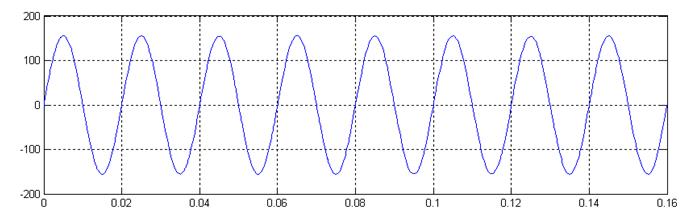
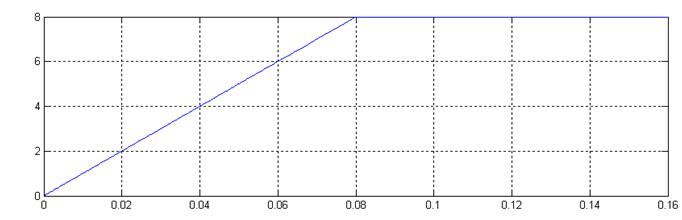
2. Генератор пилообразного напряжения

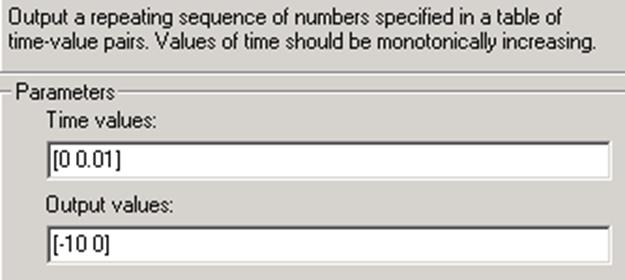
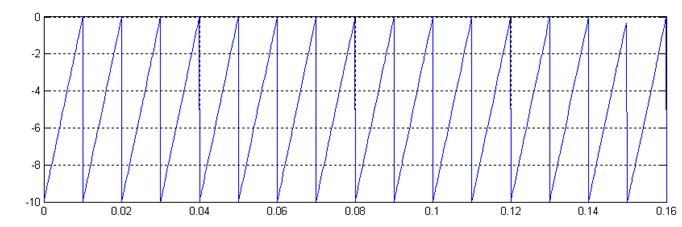
При помощи данного блока мы получаем пилообразное напряжение с частотой 100 Гц, которое в дальнейшем используется для формирования управляющих импульсов тиристоров. Выходная величина изображена на графике
3. Система блоков, осуществляющая ШИМ
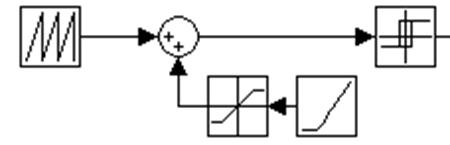
Работа системы представлена на рисунке
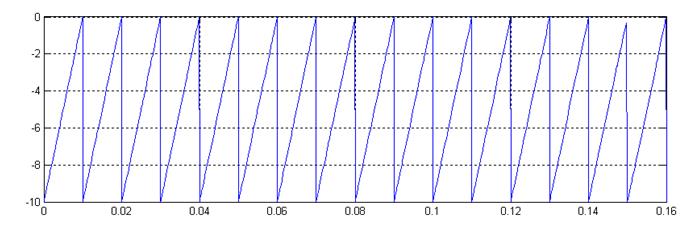
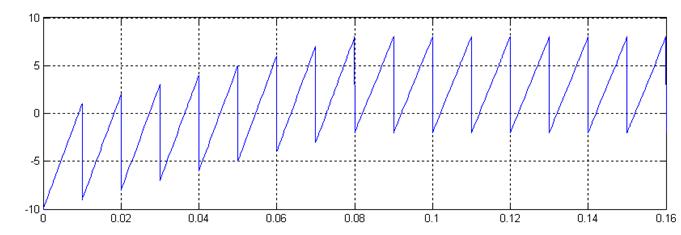
Блок “Ramp” формирует линейное нарастание напряжения. В зависимости от параметров, заданных в данном блоке можно получить различную интенсивность напряжения. Блок “Saturation” производит ограничение сигнала, полученного с вышеописанного блока. После сумматора получаем смещенное пилообразное напряжение, подающееся на релейный элемент, на выходе которого получаем импульсы частотой 100 Гц.
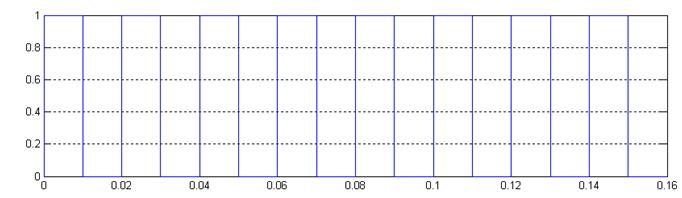
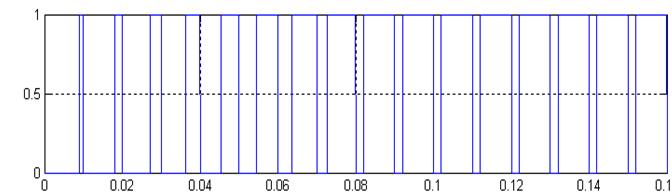
4. Распределение импульсов
Распределение импульсов осуществляется за счет логических элементов “And”, на которые подаются импульсы с частотой 100 Гц, сформированные выше, и синхроимпульсы.
В данной схеме используется два диода и два тиристора.
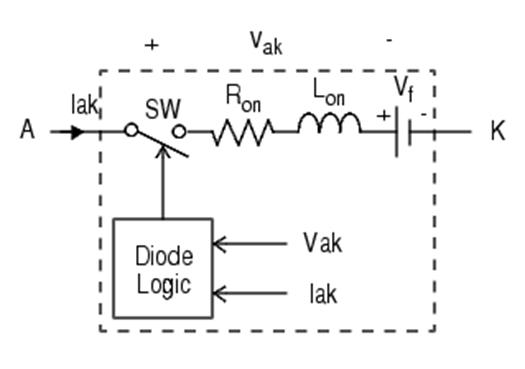
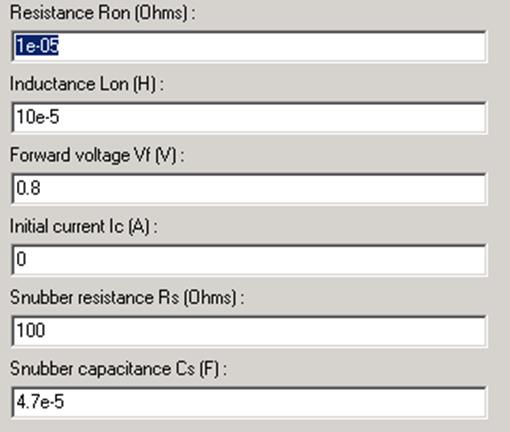
1. Диоды
Схема замещения диода
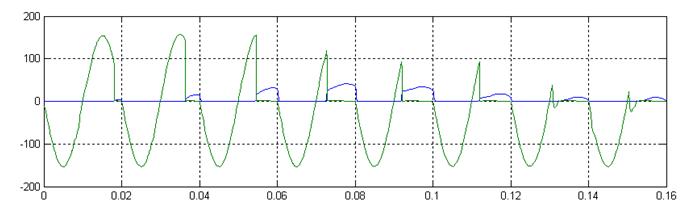
График, отображающий работу диода

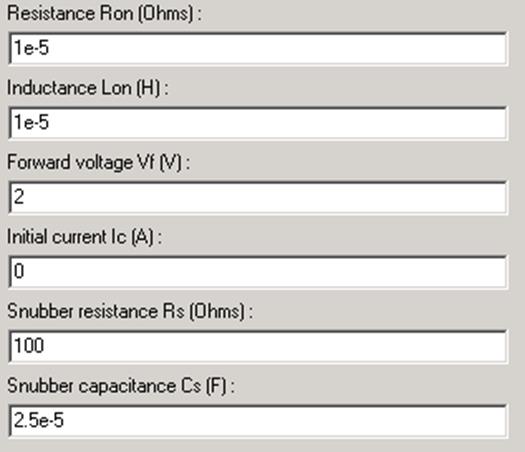
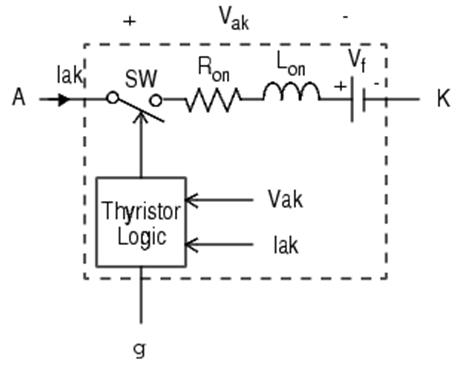
2. Тиристоры
Схема замещения тиристора
Графики, отображающие работу тиристора
Двигатель 2ПБ90LУХЛ4
РН=0,75 Квт;
UH=110 В;
nН=3000 об/мин;
nMAX=4000 об/мин;
ηН=785%;
RЯ=0,644Ом;
RДП=0.4 Ом;
ROB=182 Ом;
LЯ=17 мГн;
JД=0,005 кгּм2.
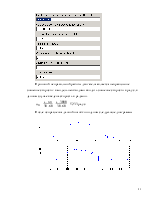
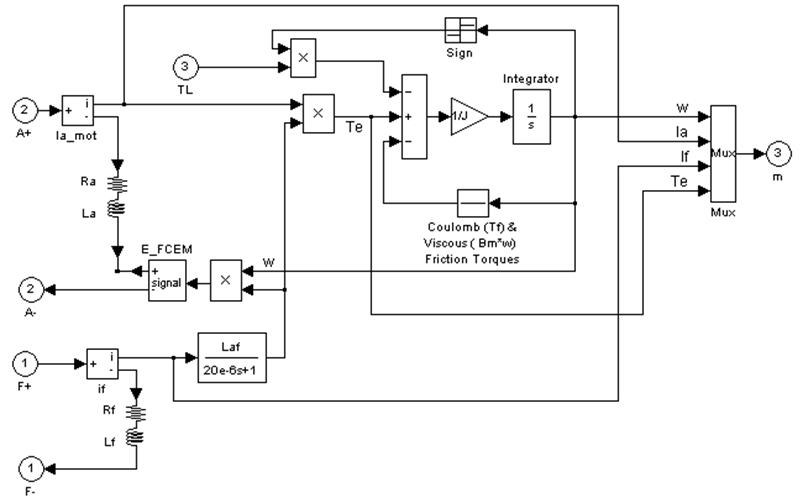
Схема замещения двигателя
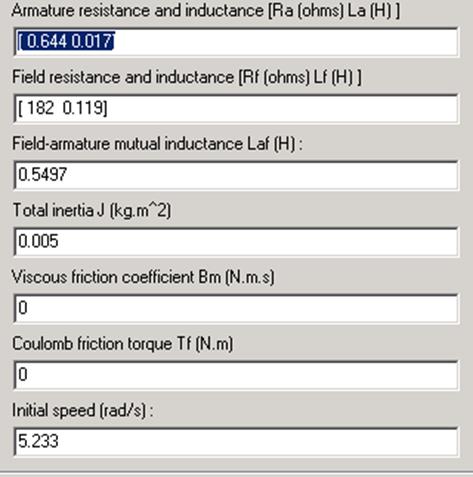
Расчет параметров схемы замещения
![]()
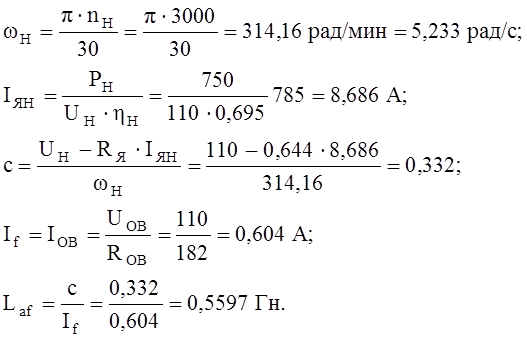 .
.
![]()
![]()
Схема, описанная в 2.1. является окончательным вариантом имитационной модели. Далее мы рассмотрим каким образом была получена данная модель.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.