Рассмотрим схему, предложенную на рис. 5.
В данной схеме управляющие импульсы на тиристоры подаются посредством блока “Pulse Generator”, отпараметрированного соответственным образом.
Диаграммы работы “Pulse Generator” приложены ниже

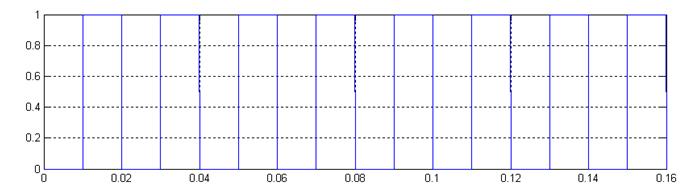
1. Импульсы, подаваемые на тиристор VS1; 2. Импульсы, подаваемые на тиристор VS2.
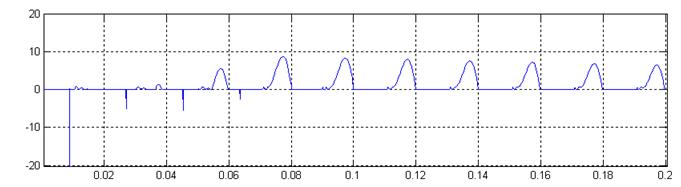
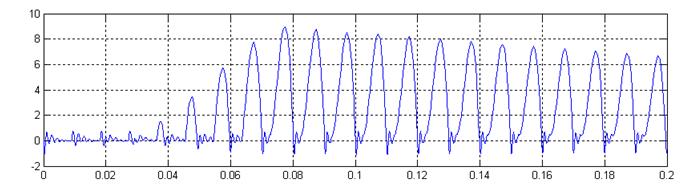
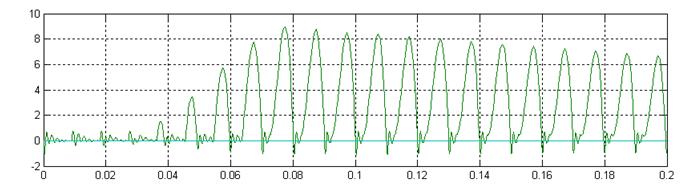
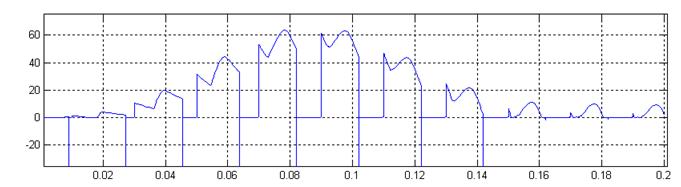
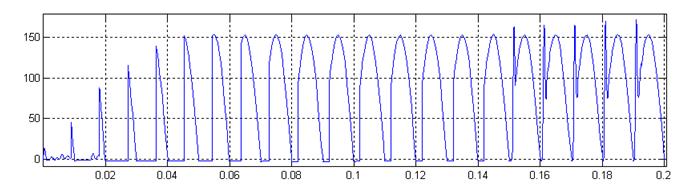
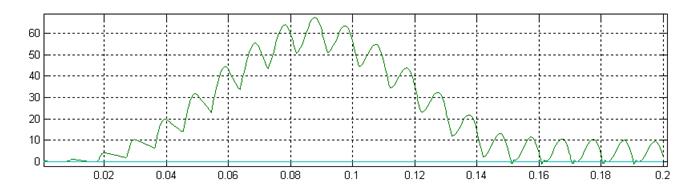
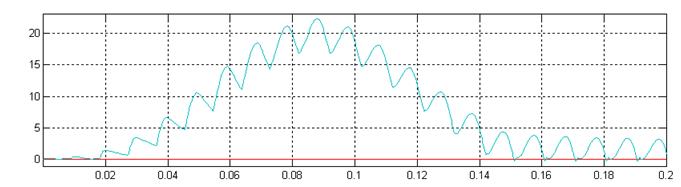
Диаграммы работы схемы представлены на рис.6.
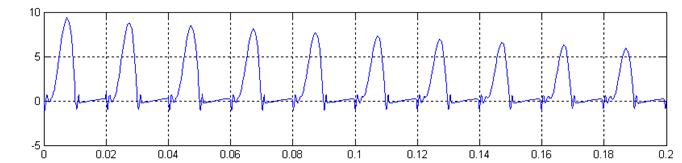

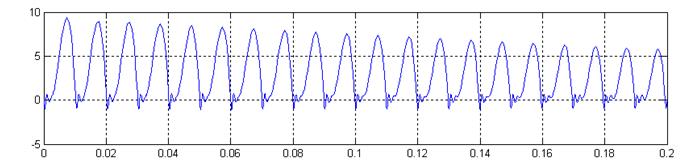
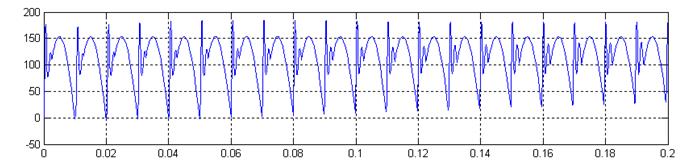

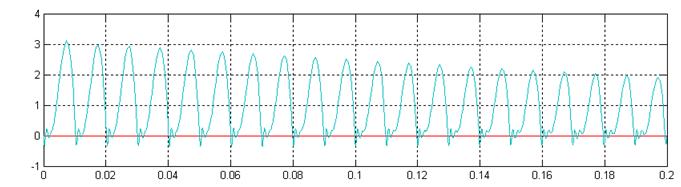
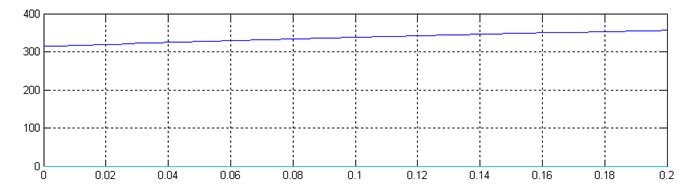
Рис. 6. Диаграмма работы
1. Ток тиристора VS1; 2. Ток диода VD2; 3. Ток на нагрузке; 4. Напряжение на нагрузке; 5. Ток якоря двигателя; 6. Момент двигателя; 7. Скорость двигателя.
Из данных диаграмм видно, что схема работает не правильно:
1. Выпрямитель работает не как однофазный полууправляемый выпрямитель. Это связано с тем, что на тиристоры поданы неправильные управляющие импульсы. Для осуществления правильной работы необходимо подавать импульсы переменной ширины с частотой, для каждого тиристора, 50 Гц, то есть необходимо осуществить широтно-импульсную модуляцию.
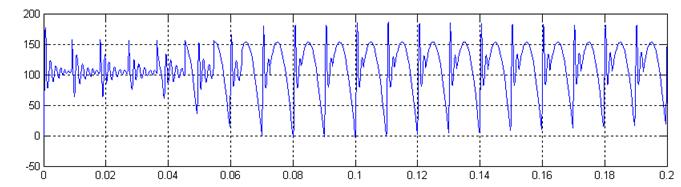
2. Неправильные формы тока и напряжения на нагрузке, о также тока якоря и момента двигателя связаны с причиной изложенной выше, а также с тем, что в модель введены неправильные параметры двигателя. Скачки напряжения до 180 В вызваны параметрами R-c цепочек полупроводниковых приборов. Для устранения этого необходимо более грамотно отпараметрировать полупроводниковые приборы.
3. Скорость двигателя устанавливается на значении 480 рад/мин за 6,5 с. Данная скорость не соответствует реальной скорости.
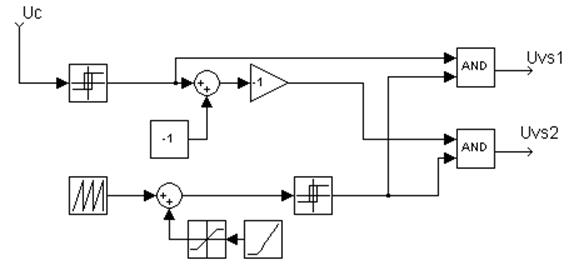
1. Для правильной работы выпрямителя необходимо осуществить правильное формирование и распределение импульсов. Для этого необходимо устройство синхронизации, обеспечивающее гальваническую развязку с питающей сетью и формирующее импульсы синхронизации Uc; генератор пилообразного напряжения, формирующий пилообразные импульсы частотой 100 Гц; компаратор, осуществляющий сравнение Uc и Uп; распределители импульсов, распределяющие полученные импульсы частотой 100 Гц по тиристорам, причем импульсы, поступающие на тиристоры имеют частоту 50 Гц.
Получаем имитационную модель СИФУ
Рассмотрим работу схемы с СИФУ


1. Ток тиристора VS1; 2. Ток диода VD2; 3. Ток на нагрузке; 4. Напряжение на нагрузке; 5. Ток якоря двигателя; 6. Момент двигателя; 7. Скорость двигателя.
Скачки тока на диодах и тиристорах достигают 4000 А.
2. Ошибки в работе схемы вызваны неправильными параметрами схемы замещения двигателя.
Расчет параметров схемы замещения
 .
.


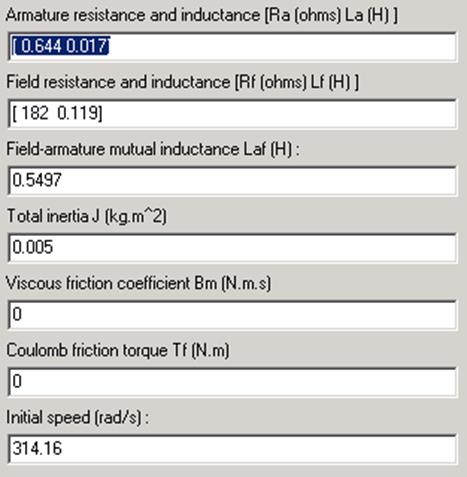
Причиной неправильной работы двигателя является неправильное значение скорости: в модель необходимо вводить значение скорости в рад/с, в данном случае введена скорость в рад/мин.

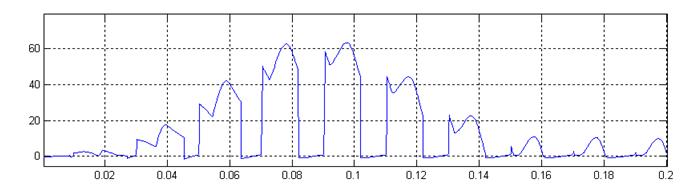
После исправления данной ошибки получим следующие диаграммы


1. Ток тиристора VS1; 2. Ток диода VD2; 3. Ток на нагрузке; 4. Напряжение на нагрузке; 5. Ток якоря двигателя; 6. Момент двигателя; 7. Скорость двигателя.
Скачки тока на диодах и тиристорах достигают 14000 А.
3. Для устранения скачков тока и напряжения необходимо подобрать правильные полупроводниковые приборы.
Имеем следующие параметры полупроводниковых приборов
Тиристоры
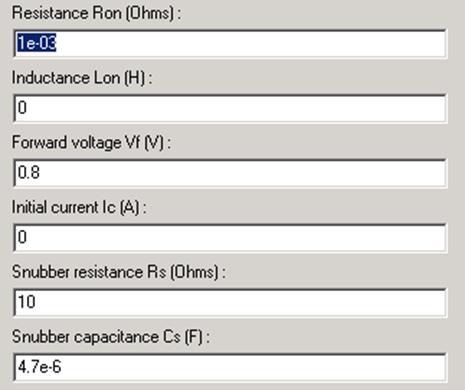
Диоды

Для оптимальной работы системы установим следующие параметры полупроводниковых приборов
Тиристоры
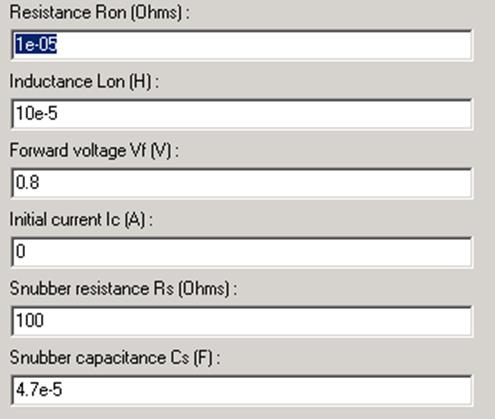
Диоды

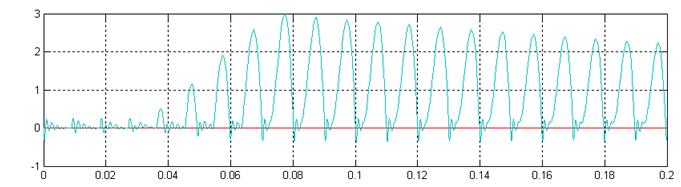
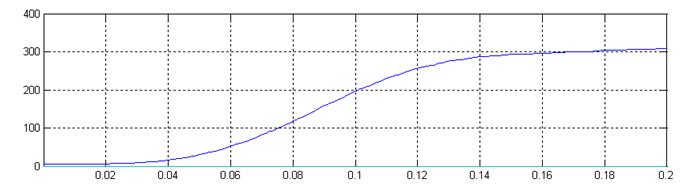
После исправления данной ошибки получим следующие диаграммы


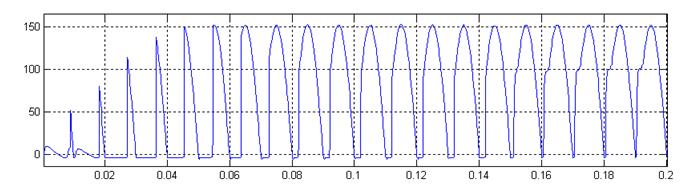


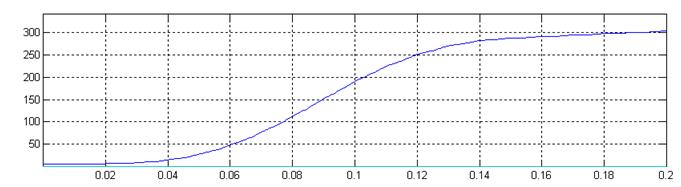
1. Ток тиристора VS1; 2. Ток диода VD2; 3. Ток на нагрузке; 4. Напряжение на нагрузке; 5. Ток якоря двигателя; 6. Момент двигателя; 7. Скорость двигателя.
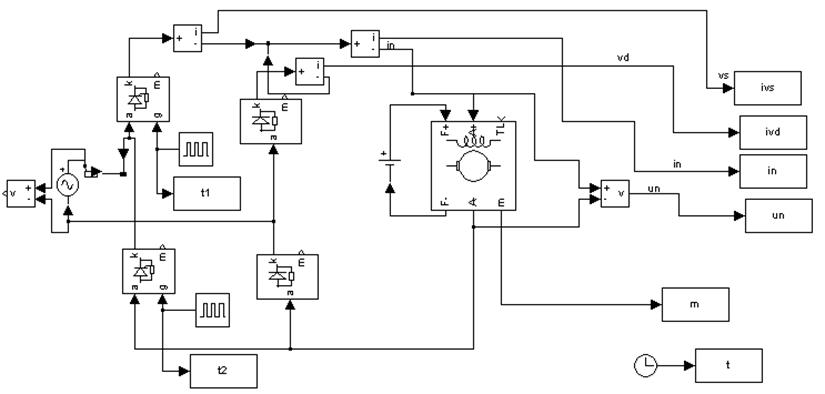
Имитационная модель, работу которой отражают данные диаграммы, является оптимальной по своим параметрам, то есть эта модель является окончательным вариантом схемы, она представлена на рис. 7.
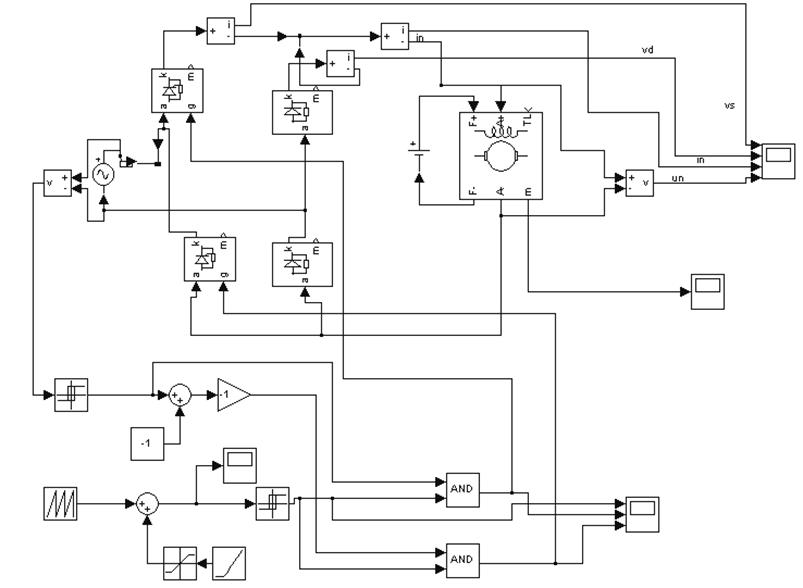
Рис. 7. Схема имитационной модели.
В начальный момент времени происходит пуск двигателя. На вентили подаются импульсы переменной ширины, что соответствует различным углам открывания тиристоров. Напряжение на нагрузке постепенно нарастает, за счет увеличения времени открытого состояния тиристоров. Ток на нагрузке достигает максимального значения в 67 А за 0,087 с, далее ток начинает спадать и в момент времени 0,15 с начинается режим прерывистого тока. Момент двигателя повторяет форму тока, только с меньшей амплитудой, максимальное значение – 22 Нּм. Начиная с режима прерывистого тока наблюдается значительное уменьшение интенсивности нарастания скорости.
В автоматизированном электроприводе используются датчики координат. Координатами являются скорость, момент и положение.
В данной работе необходимо измерять момент. Непосредственное измерение момента невозможно, поэтому измеряется ток, которому и пропорционален момент. Для этого применяется трансформаторный датчик тока.
Принципиальная схема трансформаторного датчика тока представлена на рис.8.

Рис. 8. Принципиальная схема датчика тока.
Трансформатор тока выбирается из соотношения
![]()
где 
Выбираем трансформатор тока типа И56М со следующими параметрами:
![]()
![]()
![]()
![]()
Коэффициент трансформатора тока

Коэффициент датчика тока
где 
Определим напряжение датчика тока при номинальном и максимальном значениях тока якоря
![]()
Для данного типа двигателя
![]()
![]()
Так как значение сигнала
датчика тока составляет 1,34 В, то в схему необходимо ввести усилитель (рис.
9.). Максимальное значение ![]() должно лежать в
пределах 8 В.
должно лежать в
пределах 8 В.
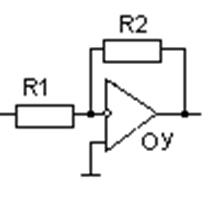
Рис. 9. Операционный усилитель

Выбираем

Из стандартного ряда принимаем
![]()
Выбираем резисторы
МЛТ–0,125–10 кОм![]() 5% – резистор R1;
5% – резистор R1;
МЛТ–0,125–62 кОм![]() 5% – резистор R2;
5% – резистор R2;
Определяем мощность резистора RТТ
![]()
Выбираем резистор RТТ
С5–16МВ–5–0,2 Ом![]() 0,5%.
0,5%.
Выбираем резистор RН=2,2 кОм
С2–34–0,125–2,2 кОм![]() 0,5.
0,5.
Выбираем диоды
 А.
А.
![]()
Выбираем диоды Д214Б.
1. Копылов Справочник по электрическим машинам, т.1.
2. Гитцевич А.Б., Зайцев А.А. и др. Справочник, “Радио и связь”,М, 1989.
3. Конспект лекций по курсу ЭАЭП.
4. Конспект лекций по курсу СПТ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.