Коэффициент обратной связи по ЭДС определим как:
 ;
;
Число пар полюсов определяется:
Коэффициент усиления по скорости:
 ;
;
В качестве регулятора ЭДС будем использовать ПИ – регулятор. Передаточная функция имеет вид:
 ;
;
3.4 Выбор принципов реализации управляющего устройства, выбор датчиков
Необходимо реализовать вычисление ЭДС, то есть формулу вида:
![]() ;
;
Сигнал от датчика тока заводится на П – регулятор, так же как и от датчика напряжения. После чего производится арифметическое суммирование. Вид П – регулятора от датчика тока приведен на рисунке 3.3.
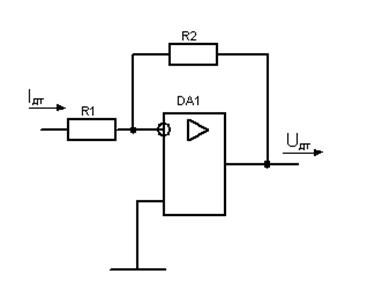
Рис. 3.3
Необходимо произвести расчёт резисторов R1 и R2.
 ;
;
Сопротивления резисторов R1 = R2, принимаем типа:
ОМЛТ – 0,125 – 1,0 кОм ± 5 %;
Вид П – регулятора от датчика напряжения приведен на рисунке 3.4.
Расчёт резисторов R3 и R4.
 ;
;
Сопротивления резисторов R3 = R4, принимаем типа:
ОМЛТ – 0,125 – 1,0 кОм ± 5 %;
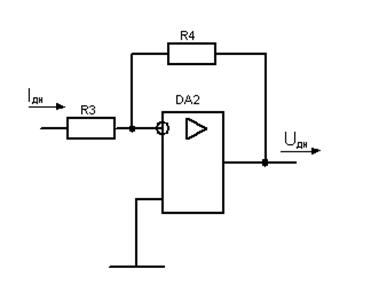
Рис. 3.4
Компаратор приведен на рисунке 3.5.
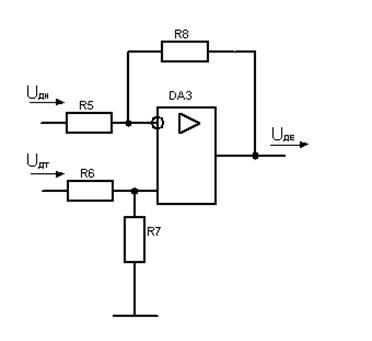
Рис.3.5
Расчёт резисторов R5, R6, R7, R8:
![]() ;
;
 ;
;
Зададимся значениями резисторов:
R8 = R7: ОМЛТ – 0,125 – 1,0 кОм ± 5 %;
Тогда
 ;
;
Примем резистор типа: ОМЛТ – 0,125 – 43 кОм ± 5 %;
 ;
;
Примем резистор типа: ОМЛТ – 0,125 – 9,1 кОм ± 5 %;
В качестве датчика напряжения принимаем датчик на основе элемента холла типа: LV25-P/SP3.
В качестве датчика тока так же используем элемент холла типа: LTS25 – NP.
Расчёт усилителя в канале регулирования частоты вращения двигателя. Вид усилителя представлен на рисунке 3.6.
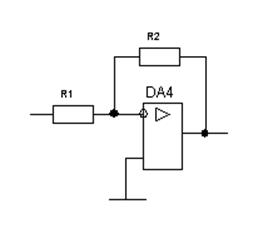
Рис. 3.6
Необходимо произвести расчёт резисторов R1 и R2.
 ;
;
Сопротивления резисторов R1 и R2, принимаем типа:
R1: ОМЛТ – 0,125 – 1,0 кОм ± 5 %;
R2: ОМЛТ – 0,125 – 33,0 кОм ± 5 %;
Операционные усилители будем использовать типа: КР140УД22.
3.5 Синтез управляющего устройства, ограничение координат
При синтезе СУЭП будем использовать в качестве объекта управления электродвигатель, состоящий из двух составляющих: электромеханическая и механическая составляющие. В качестве электромеханической составляющей примем эквивалентную постоянную времени асинхронного электродвигателя. В качестве управляющего устройства используется ПИ – регулятор ЭДС. Вид структуры СУЭП представлен на рисунке 3.7.
 |
Рис. 3.7
При синтезе не будем учитывать внутреннюю обратную связь по ЭДС (скорости). Уравнение имеет вид:
 ;
;
Передаточная функция имеет вид:
 ;
;
Приравняем при одинаковых степенях р:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
Оптимизируем по модульному оптимуму.
![]() ;
;
 ;
;
3.6 Выбор задающего устройства
Структурная схема задатчика интенсивности для СУЭП скорости представлена на рисунке 3.8.
 |
где – РЭ – релейный элемент, выходной сигнал которого может принимать только два значения в зависимости от полярности входного сигнала.
 ;
;
При ![]() , и
, и ![]() получаем.
получаем.
 ;
;
Из основного уравнения движения электропривода, ![]() равно:
равно:
 ;
;
 ;
;
Приняв ![]() , а
, а ![]() получим:
получим:
 ,
откуда
,
откуда  ;
;
 ;
;
Окончательно получаем:
 ;
;

Построение задатчика интенсивности принципиально приведено на рисунке 3.9.
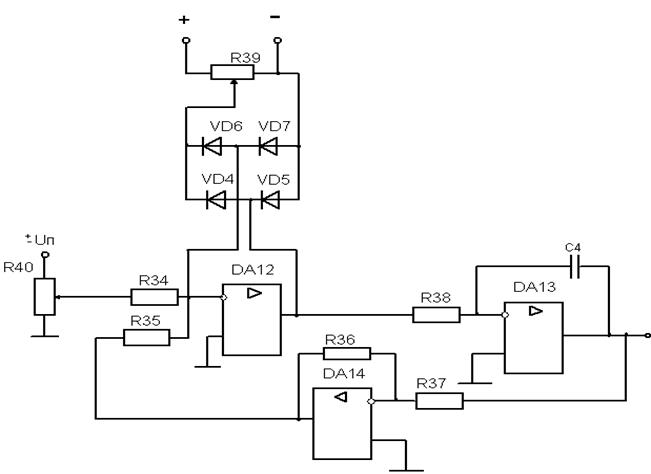
Рис. 3.9
Выбираем
резисторы R34, R35, R36, R37 типа: ОМЛТ-0.125-1 кОм![]() 5%.
5%.
 ;
;
Для расчёта примем конденсатор типа: КЭ-15В-1мФ;
 ;
;
Принимаем резистор типа: ОМЛТ – 0,125 – 1,6 кОм ± 5 %;
3.7 Реализация управляющего устройства
ПИ – регулятор ЭДС реализуем как два регулятора, И – регулятор и П – регулятор. Вид схемы включения приведен на рисунке 3.10.
Рис. 3.10
Произведём расчёт параметров резисторов R1, R2, R3, R4, и конденсатора С1:
Для расчёта примем конденсатор типа: КЭ-15В-1мкФ;
![]() ;
;
Тогда:
 ;
;
Принимаем резистор типа: ОМЛТ – 0,125 – 11 кОм ± 5 %;
 ;
;
Примем R3 = R4 типа: ОМЛТ – 0,125 – 1 кОм ± 5 %;
 ;
;
 ;
;
Принимаем R2 типа: ОМЛТ – 0,125 – 1,1 кОм ± 5 %;
Функциональный преобразователь представлен на рисунке 3.11.
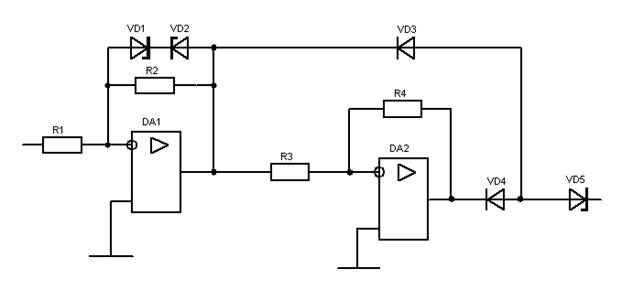
Рис. 3.11
Рассчитаем сумматор установленный на входе ПИ – регулятора который суммирует сигнал от функционального преобразователя с сигналом обратной связи по ЭДС. Вид регулятора представлен на рисунке 3.12.
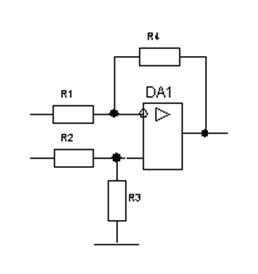
Рис. 3.12
Расчёт резисторов R1, R2, R3, R4:
![]() ;
;
Зададимся значениями резисторов:
R1 = R2 = R3 = R4: ОМЛТ – 0,125 – 1,0 кОм ± 5 %;
3.8 Полная функциональная схема СУЭП
Составим полную функциональную схему СУЭП при скалярном частотном управлении с обратной связью по ЭДС. Развернём силовую часть электропривода, а так же конкретизируем вид регулятора ЭДС. Полная функциональная схема приведена на рисунке 3.13.
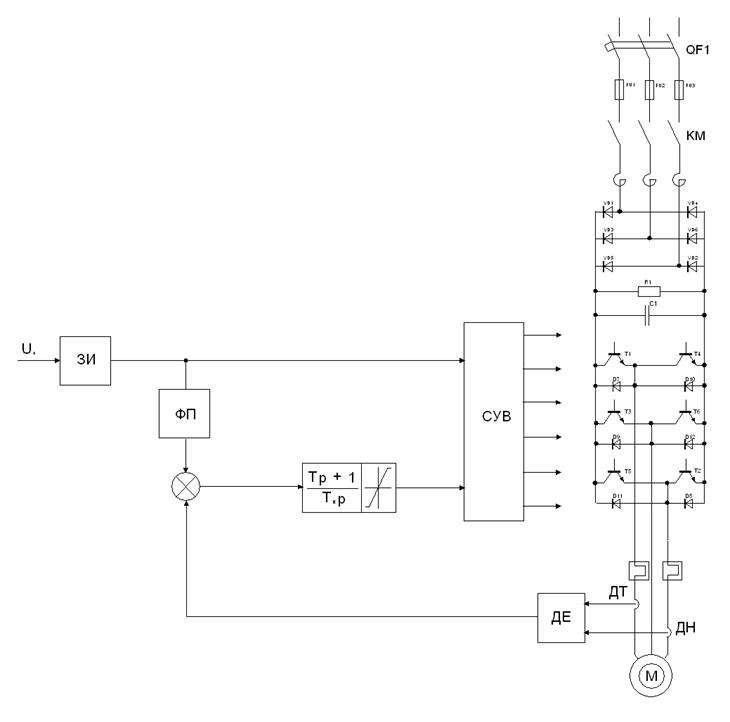
Рис. 3.13
где СУВ – система управления вентилями;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.