6 АНАЛИЗ ДИНАМИЧЕСКИХ И СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕКТРОПРИВОДА
6.1 Разработка имитационной модели электропривода
Цель имитационного моделирования заключается в определении качества переходных процессов при различных режимах работы электропривода, в правильности выбора двигателя и синтеза системы управления, в проверке выполнения условий и требований технологического процесса.
В качестве средства реализации имитационной модели выбираем систему имитационного моделирования “Simulink”, входящую в состав пакета прикладных программ “Matlab 6.5”.
В качестве модели объекта управления используем модель асинхронного двигателя. В модели асинхронного электродвигателя задаются следующие параметры:
- полная мощность двигателя;
- фазное напряжение питания;
- номинальная частота двигателя;
- активные сопротивления статора и ротора;
- индуктивности статора и ротора;
- индуктивность намагничивающего контура;
- момента инерции механизма, приведенного к валу двигателя.
Структурная схема задатчика расхода (скорости) представлена на рисунке 6.1.
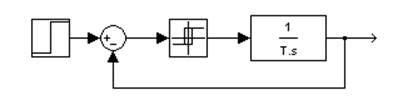
Рисунок 6.1 - Структурная схема задатчика расхода
Параметр Т определяет время пуска.
При частотном
управлении по закону ![]() номинальное значение ЭДС можно
вычислить по следующей формуле
номинальное значение ЭДС можно
вычислить по следующей формуле
![]() .
.
Структурная схема имитационной модели электропривода представлена на рисунке 6.2.
6.2. Расчет и определение показателей качества переходных процессов
Для
анализа динамических характеристик рассмотрим зависимости электропривода ![]() и характеристику насоса Q(t). Характеристику i(t) покажем в осях q-d.
и характеристику насоса Q(t). Характеристику i(t) покажем в осях q-d.
При моделировании отобразим следующие режимы работы электропривода:
- разгон до пониженной скорости и затем разгон до номинальной скорости;
- торможение с номинальной скорости до пониженной и далее до полной остановки;
- отработка системой возмущающего воздействия при номинальной и пониженной скоростях.
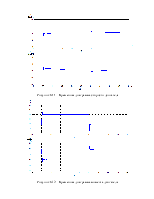
На рисунках 6.3–6.6 представлены временные диаграммы при разгоне электропривода до пониженной скорости, и затем разгон до номинальной скорости. На рисунках 6.7–6.10 представлены временные диаграммы при торможении электропривода с номинальной скорости до пониженной и далее до полной остановки.
На рисунках 6.11а)–6.14а) представлены временные диаграммы при отработке системой возмущающего воздействия на пониженной скорости (UЗ=5В). На рисунках 6.11б)–6.14б) представлены временные диаграммы при отработке системой возмущающего воздействия при номинальной скорости (UЗ=10В).
Рисунок 6.2 – Структурная схема имитационной модели электропривода
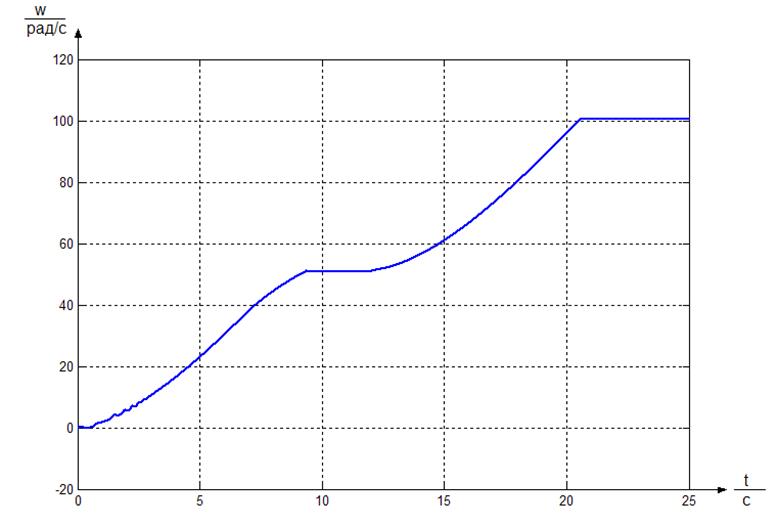
Рисунок 6.3 – Временная диаграмма скорости двигателя
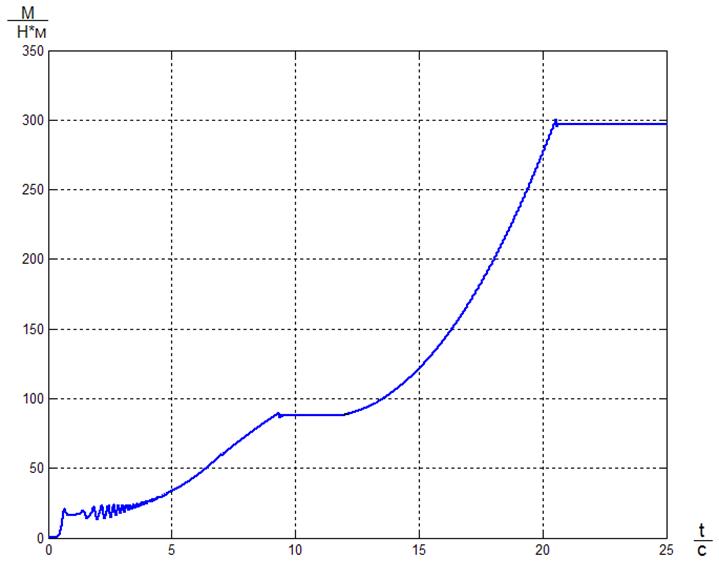
Рисунок 6.4 – Временная диаграмма момента двигателя
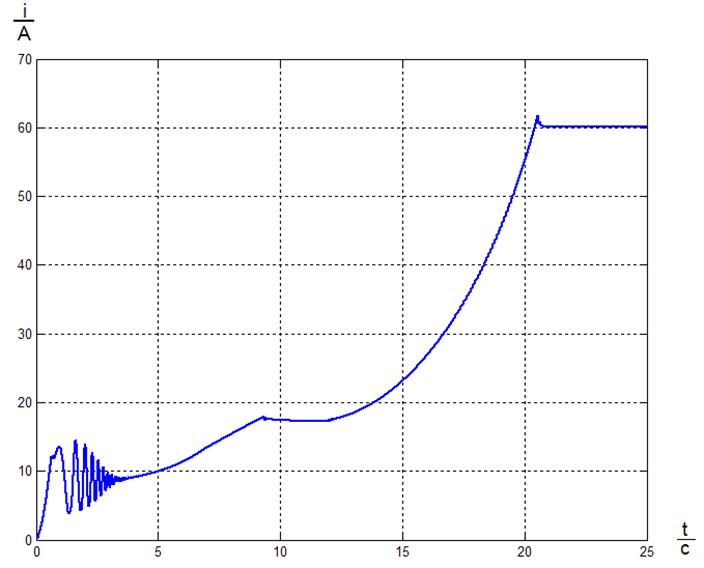
Рисунок 6.5 – Временная диаграмма тока статора
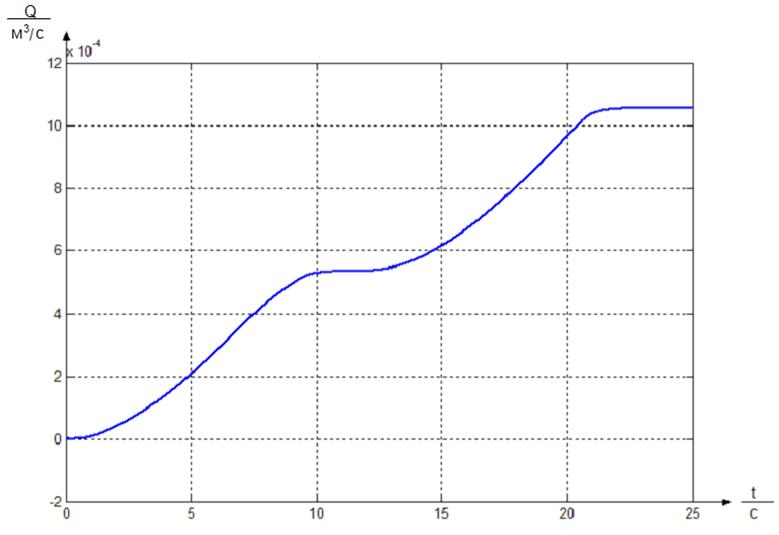
Рисунок 6.6 – Временная диаграмма расхода жидкости

Рисунок 6.7 – Временная диаграмма скорости двигателя
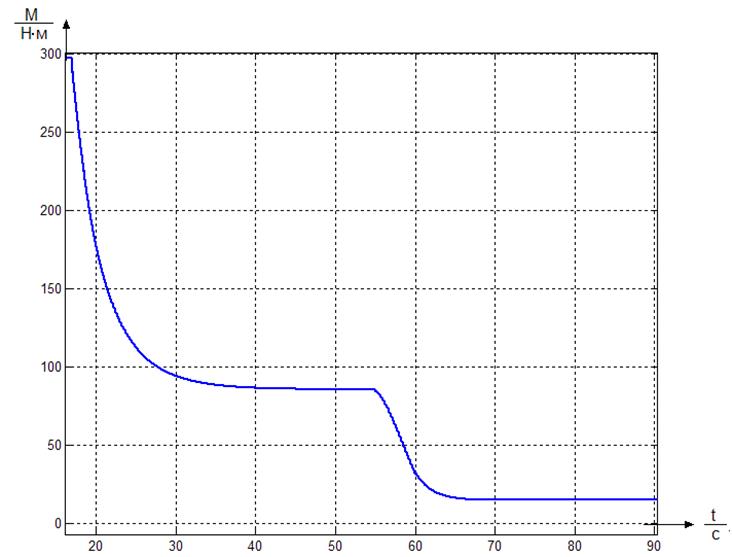
Рисунок 6.8 – Временная диаграмма момента двигателя
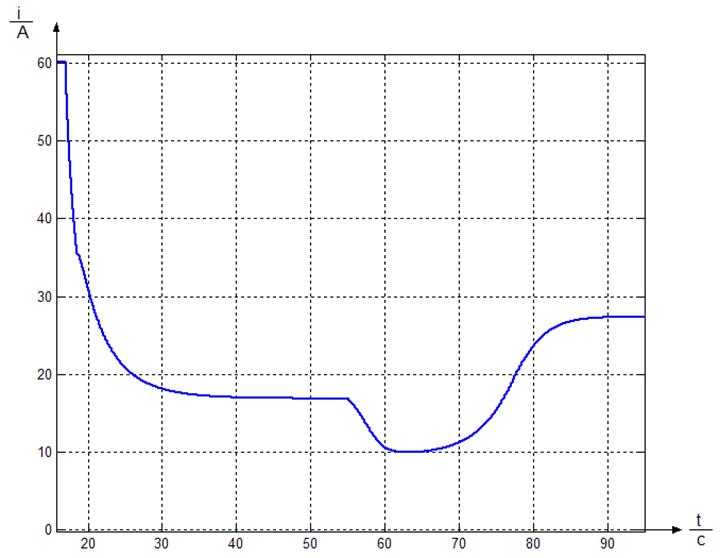
Рисунок 6.9 – Временная диаграмма тока статора
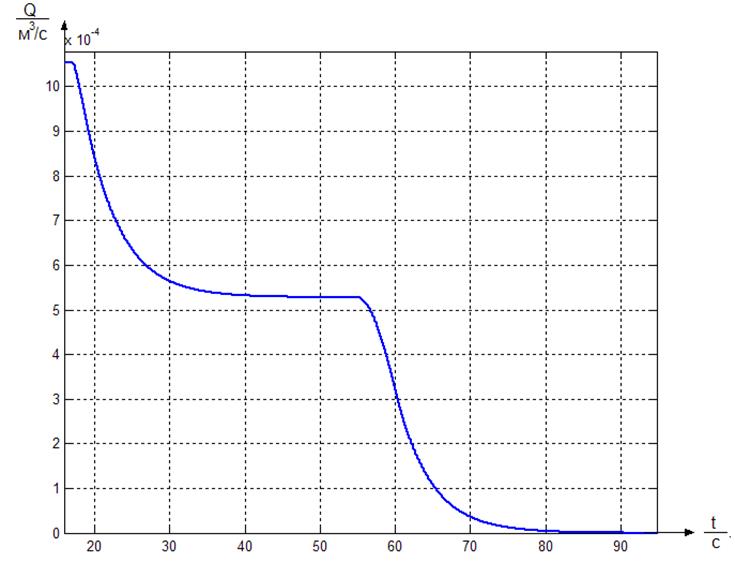
Рисунок 6.10 – Временная диаграмма расхода жидкости
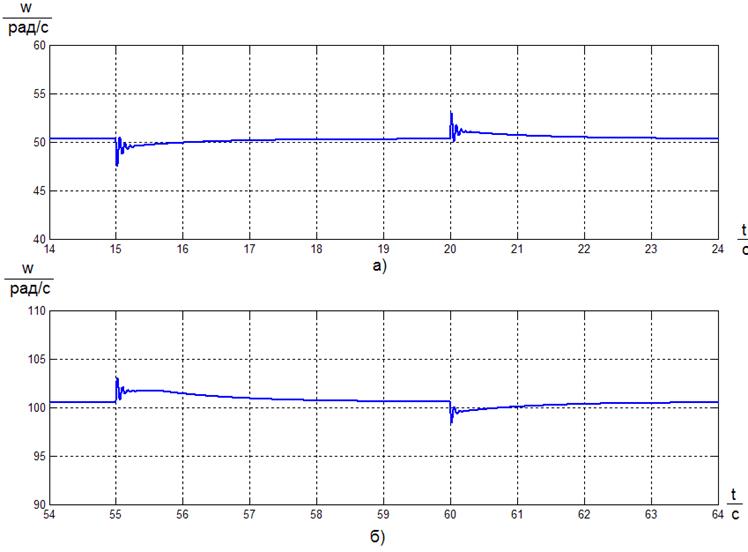
Рисунок 6.11 – Временная диаграмма скорости двигателя
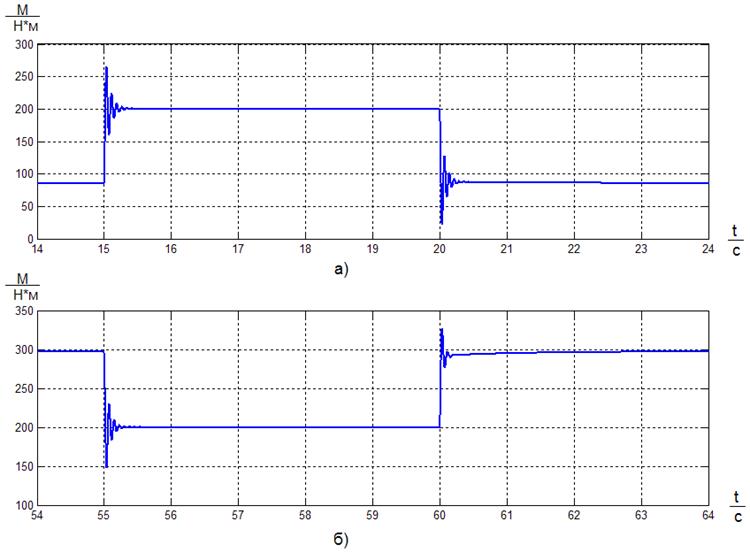
Рисунок 6.12 – Временная диаграмма момента двигателя
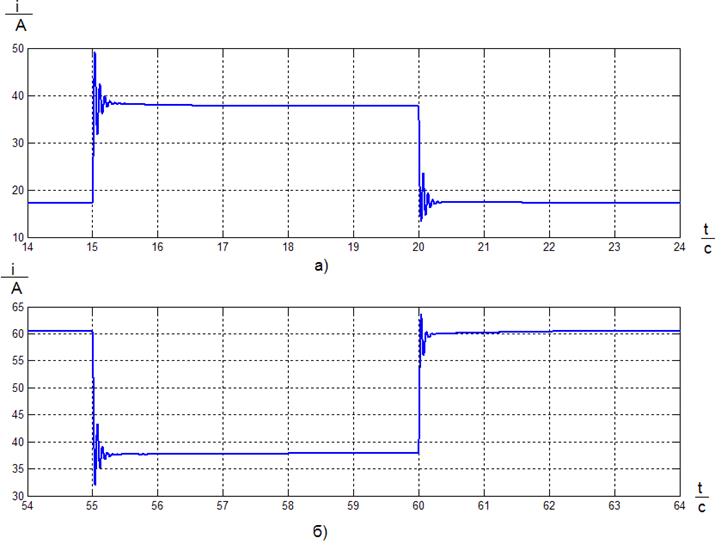
Рисунок 6.13 – Временная диаграмма тока статора
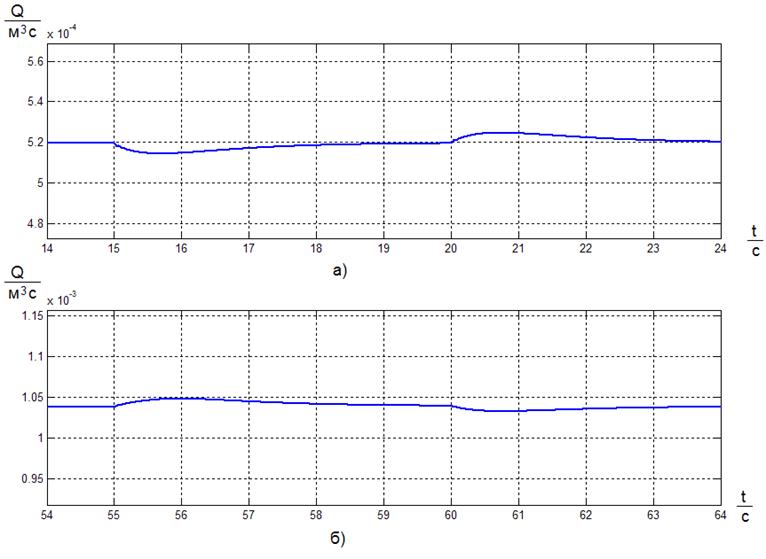
Рисунок 6.14 – Временная диаграмма расхода жидкости
Проанализировав полученные временные диаграммы, можно сделать следующие выводы:
- требование технического задания, а в частности требование плавного пуска и недопустимых пульсаций момента, выполнены;
- условия перегрузки по моменту и по току соблюдены;
- стабилизация скорости и расхода при возмущающих воздействиях обеспечивается.
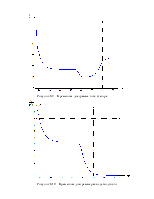
6.3 Построение статических характеристик электропривода
Характеристики замкнутой системы стабилизации скорости (расхода) в установившемся режиме являются астатическими. Статические характеристики электропривода для частот 50; 37,5; 25; 12,5 Гц приведены на рисунке 6.15
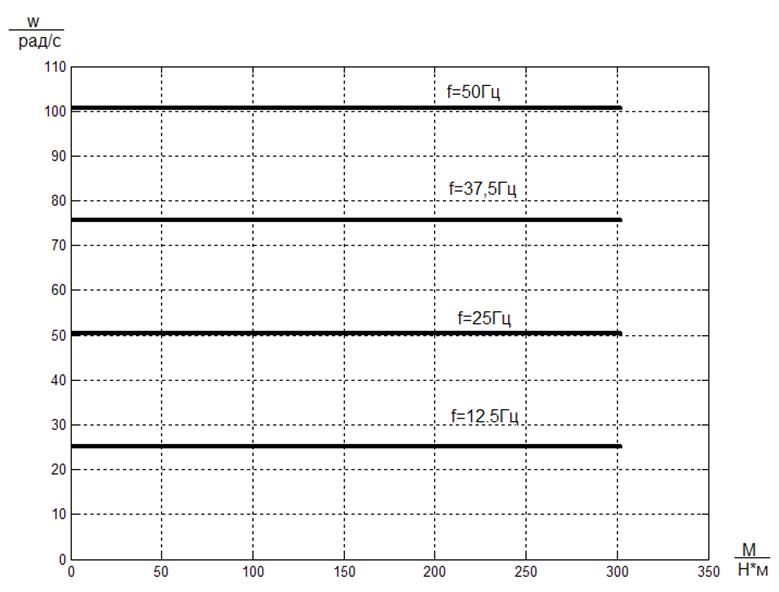
Рисунок 6.14 – Статические характеристики электропривода
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.