демпфирование (lпред = 2,2) и соответствует значительным Тэ*, в то время как при Тэ* = 0, lmax = 0,85, т. е. ниже в 2,6 раза.
Так как индуктивность диссипативными свойствами не обладает, возможность ее демпфирующего действия требует разъяснений. При малых g и m < 4 система имеет две пары комплексных корней и две резонансные частоты, из которых первая пара и первая частота характеризуют колебательность двигателя, а вторая резонансная частота близка к частоте свободных механических колебаний. При увеличении индуктивности рассеяния колебательность двигателя, зависящая от m = Тм1 / Тэ, увеличивается и меньший резонансный пик АЧХ возрастает. Однако увеличение колебательности двигателя при малом моменте инерции J2 увеличивает электромеханическую связь и отвод энергии механических колебаний в цепь якоря; второй резонансный пик, обусловленный параметрами механической части, соответственно уменьшается.
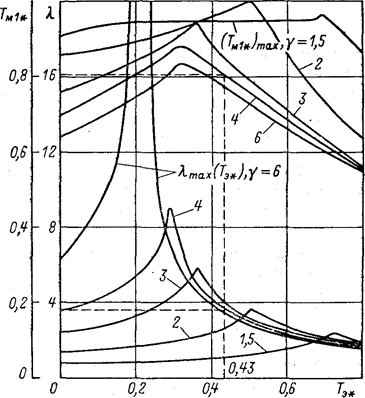
Рис. 4.18. Характеристики максимального демпфирования.
Увеличение индуктивности приводит к уменьшению общей колебательности системы только до того ее значения, при котором наступает равенство резонансных пиков. Дальнейшее увеличение индуктивности вызывает возрастание колебательности. Такие условия наступают тем раньше, чем больше g.
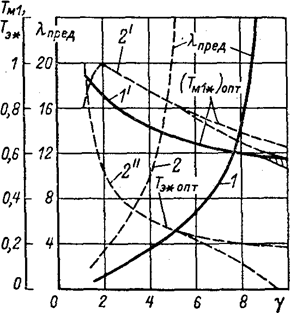
При Тэ* = 0 значения lmax однозначно определяются соотношением масс g. Зависимости lmax = ¦(g) и (Tм*1)опт = ¦(g) при Тэ* = 0 представлены на рис. 4.19 (кривые 1 и 1'). Они иллюстрируют закономерность, согласно которой в системе без электромагнитной инерции подбором жесткости механической характеристики получить апериодический характер процессов можно только при g ³ 9. При g > 9 критическому демпфированию соответствуют два значения (Тм1*.)max и два значения жесткости механической характеристики. Кривая 1' в этой области разветвляется, и заштрихованной зоне соответствуют значения Тм1*., при которых все корни уравнения (4.37) являются действительными и отрицательными.
Кривые на рис. 4.18 свидетельствуют о том, что варьирование электромагнитной инерционности двигателя позволяет получить при каждом g большее демпфирование, чем при Тэ* = 0. Предельные значения логарифмического декремента, соответствующие каждому g, позволяют построить зависимость lпред = ¦(g) и соответствующие ей зависимости (Тм1*)опт = ¦(g) и (Тэ*)опт = ¦(g) (кривые 2, 2' и 2" на рис. 4.19). Эти кривые показывают, что при наличии электромагнитной инерции Тэ* ¹ 0 критическое демпфирование достигается при g ³ 5,5, т. е. возможности использования демпфирующего действия электропривода в системах с малым приведенным моментом инерции механизма повышаются.
Представленные на рис. 4.18 характеристики дают возможность определять сочетания параметров, оптимальные по демпфированию колебаний в упругой разомкнутой электромеханической системе.
Пример 4.2. Определить оптимальную по критерию минимума колебательности жесткость механической характеристики электропривода постоянного тока, для которого частные параметры электрической и механической частей имеют следующие значения:
|
|
kФном=с=2,84 В×с; RяS=0,098 Ом (в нагретом состоянии машины); Тя = 0,03 с; J1 = 3,5 кг×км2; J2 = 10,5 кг×м2; c12 = 548 Н×м.
Определим обобщенные параметры, соответствующие (4.35):
b = с2/RяS = 2,842/0,098 = 82,3 Н×м×с;
Рис. 4.19. Характеристики предельного демпфирования.
 1/с
1/с
Тэ* = ТэW12 = 0,03×14,45 = 0,43; (Тм1*)е = J1W12 / b = 3,5×14,45 / 82,3 = 0,61
При g = 4,0 и Тэ* = 0,43 по кривым рис. 4.18 определяем значения lmax и (Тм1*) max:
lmax = 3,5; (Тм1*)max = 0,805
Модуль оптимальной при Тэ* = 0,43 жесткости механической характеристики
bmax = J1W12/(Тм1*)max3,5×14,45/0,805 = 63 Н×м×с,
Сравнивая bmax c b, можно заключить, что для получения максимального демпфирования при Тя = 0,03 с жесткость механической характеристики нужно уменьшить на 24%.
Для реализации предельного демпфирования по кривым
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.