1. Требования к системе управления электроприводом
1.1 Технические данные и особенности электродвигателя
В соответствии с заданием на курсовое проектирование в системе электропривода будем использовать двигатель типа: 4MTKF(H)200LB6.
Асинхронные двигатели серии 4МТ предназначены для работы на подъемно-транспортных механизмах и в электроприводе механизмов металлургических агрегатов. Все двигатели этой серии рассчитаны для эксплуатации в условиях открытого воздуха и имеют степень защиты IP44 (защищает от попадания внутрь твёрдых тел более 1 мм и от брызг). Охлаждение двигателей производится снаружи с помощью вентилятора на валу. Крепление вентилятора к валу – на шпонке болтовым зажимом. Роторы двигателей балансируются с помощью балансировочных колец.
Обмотка ротора короткозамкнутых исполнений ЭД выполняется литой из алюминиевого сплава повышенного сопротивления. Двигатели, рассчитанные для условий эксплуатации при температуре окружающей среды не выше 40 °С, имеют изоляцию класса F и типовое обозначение 4МТF,4MTKF. Двигатели, рассчитанные для условий эксплуатации при температуре окружающей среды не выше 50 °С и выше (металлургия), имеют изоляцию класса H и типовое обозначение 4МТH,4MTKH. Двигатели с высотой оси вращения свыше 200 мм изготавливаются только с изоляцией класса Н.
Все двигатели рассчитаны на 2 группы напряжений 220/380В и 380/660В, 50 Гц и имеют в коробке выводов 6 выводных концов для включения обмоток соответственно в треугольник или звезду.
Серия построена на 7 диаметрах и имеет соответственно высоты оси вращения 112, 132, 160, 200, 225, 280, 355. В типовом обозначении первые 3 знака 4МТ – порядковый номер серии; буква К – короткозамкнутое исполнение; буквы F и H – тип изоляции; три цифры – высота оси вращения; буквы S, M, L, LB – условный размер двигателя по длине; цифра – число полюсов.
Номинальные данные используемого электродвигателя:
- номинальная мощность электродвигателя Pн = 30 кВт
- номинальная частота вращения nном = 935 об/мин
- коэффициент мощности cosjном = 0,78
- максимальный момент Мmax = 980 Н×м
- пусковой момент Мп = 932 Н×м
- пусковой ток Iп = 380 А
- ток статора I1 = 70 А
- коэффициент полезного действия h = 83,5 %
- момент инерции двигателя J = 0,68 кг×м2
Расчетные данные используемого электродвигателя:
- Xк=0,455 Oм – индуктивное сопротивление короткого замыкания;
- I0 = 42,1 A - ток холостого хода;
- Rк=0,36 Oм – активное сопротивление короткого замыкания;
- R1=0,132 Ом – сопротивление обмотки статора при t=20°С.
-
![]() -
квадрат коэффициента трансформации ЭДС.
-
квадрат коэффициента трансформации ЭДС.
Произведём расчёт параметров двигателя необходимых при проектировании электропривода.
Номинальная угловая частота вращения двигателя:

номинальное скольжение:
Sном = 
синхронную угловую скорость
 ;
;
номинальный момент на валу
 .
.
1.2 Кинематическая расчетно-механическая схема электропривода
На рисунке 1.1 приведена кинематическая схема системы электропривода.
Рис.1.1. Кинематическая схема ЭП.
ЭД – электродвигатель
МП – механическая передача
Приведенный к валу ЭД номинальный момент нагрузки.
![]() ;
;
Номинальный момент механической передачи.
![]() ;
;
Момент инерции передаточного механизма:
![]() ;
;
Приведенный к валу ЭД момент инерции механизма:
![]()
Суммарный момент инерции.
![]() ;
;
Время пуска. Пуск двигателя по условиям задания осуществляется под нагрузкой.

1.3 Статические и динамические нагрузки электропривода
Для построения системы управления электроприводом важно знать в каких пределах изменяется статический и динамический моменты.
Момент в статике изменяется в пределах определяемых по формулам
![]()
![]()
Для построения пределов изменения динамического момента необходимо определить максимальный момент двигателя, который равен:
Мmax = 980 Н×м
![]() ;
;
![]() ;
;
Произведём построение механической характеристики в статическом режиме. Механическая характеристика представлена на рисунке 1.2.
 |
Рис. 1.2. Механическая характеристика в статическом режиме.
Произведём построение механической характеристики в динамическом режиме. Механическая характеристика представлена на рисунке 1.3.
 |
Рис. 1.3 Механическая характеристика в динамическом режиме.
1.4 Требования к системе управления электроприводом
В соответствии с заданием на курсовой проект необходимо разработать систему управления электроприводом со следующими требованиями и параметрами:
тип двигателя - 4MTKF200LB6
требуемый статизм характеристики: Sх - 0,05;
суммарная погрешность: DS - 0,1;
коэффициент плавности задания
скорости - не более ![]() ;
;
В соответствии с заданием на курсовое проектирование сформулируем требования, предъявляемые к системе автоматического управления:
1. Обеспечить регулирование скорости в диапазоне D = 5;
2. Обеспечить реверсирование двигателя и регулирование
скорости выше номинальной, ![]() с требуемой плавностью
задания скорости;
с требуемой плавностью
задания скорости;
3. Обеспечить надёжную работу СУЭП;
4. Удобство наладки и диагностики СУЭП;
5. Обеспечить удобство монтажа и ремонта, лёгкий доступ к основным схемам и узлам, блочное построение;
6. Обеспечить режим работы электропривода до 30 вкл/час;
 ;
;
7. Обеспечить исключение влияния внешних помех и испускание собственных помех;
8. Обеспечить пожаро–огнебезопасную систему электропривода;
9. Минимальные массогабаритные показатели;
10. Минимальная стоимость системы электропривода и минимальные затраты в процессе эксплуатации;
11. Обеспечить требования техники безопасности в соответствии с ПТ и ТБ.
1.5 Предварительный выбор схемы главных цепей и функциональной схемы автоматического управления.
Исходя из требований, предъявляемых к системе управления ЭП, можно сделать выбор схемы главных цепей и функциональной схемы автоматического управления. Так как мы регулируем скорость в широких пределах, причем и выше номинальной, то необходимо двухзвенный преобразователь частоты с промежуточной цепью постоянного тока.
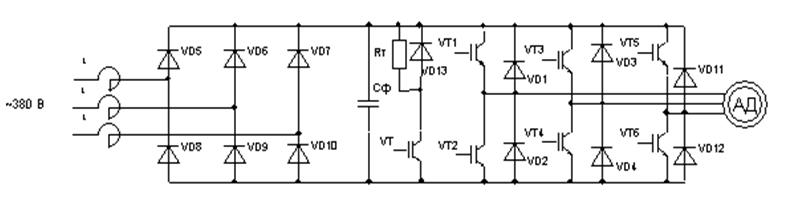
Рис. 1.4. Схема силовой части электропривода.
Т.к. диапазон регулирования небольшой D=4, то управление будет осуществляться по скалярному закону с обратной связью по ЭДС. Номинальная мощность электродвигателя равна 30 кВт, значит, двигатель будет тормозиться динамически на тормозное сопротивление Rт.
Так же данная система управления должна обеспечить возможность регулирования скорости в верх от номинальной (w ≥ wH).
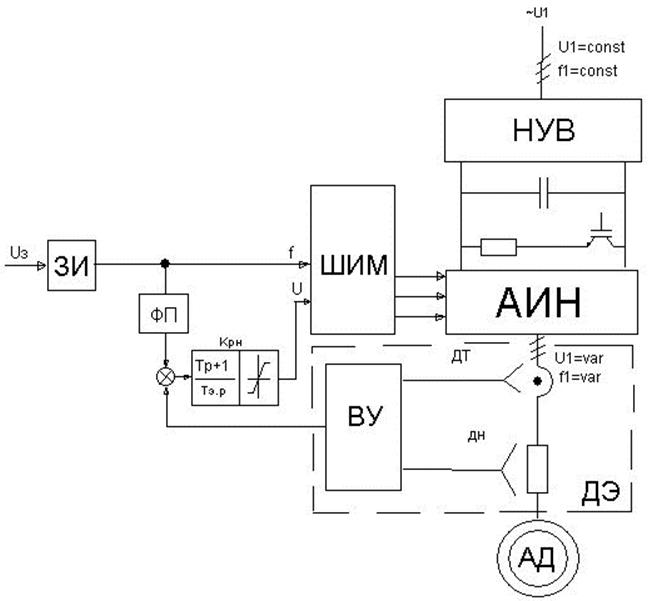
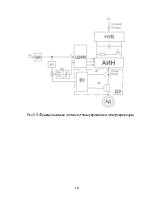
Рис.1.5. Функциональная схема системы управления электроприводом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.