СИНТЕЗ РЕГУЛЯТОРА СКОРОСТИ В САУ С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ
Суть метода синтеза регулятора заключается в компенсации с помощью регуляторов ОУ нежелательных динамических (инерционных) звеньев объекта. Регуляторы будут определять динамику и статику системы.
СПР имеют несколько независимых регуляторов,
каждый из которых оптимизирует определенный параметр (![]() ).
СПР многоконтурная система. Число регуляторов равно числу регулируемых
координат. На каждую координату свой регулятор. Внешнему подчиняется
последующий внутренний. Настройка регулятора производится последовательно от
внутреннего к внешнему.
).
СПР многоконтурная система. Число регуляторов равно числу регулируемых
координат. На каждую координату свой регулятор. Внешнему подчиняется
последующий внутренний. Настройка регулятора производится последовательно от
внутреннего к внешнему.
Принцип реализации:
СПР обеспечивают высокие статические и динамические характеристики. Структура и элементы стандартизированы. Это упрощает изготовление , наладку и ремонт .
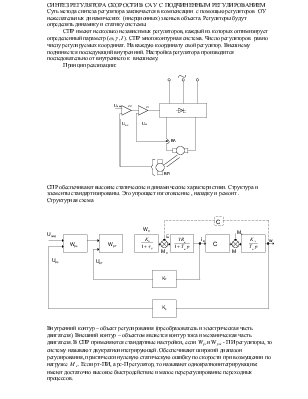
Структурная схема
Внутренний контур – объект регулирования (преобразователь и
электрическая часть двигателя). Внешний контур – объектом является контур тока
и механическая часть двигателя. В СПР применяются стандартные настройки, если ![]() - ПИ регуляторы, то систему называют
двукратноинтегрирующей. Обеспечивают широкий диапазон регулирования, практически
нулевую статическую ошибку по скорости при возмущении по нагрузке
- ПИ регуляторы, то систему называют
двукратноинтегрирующей. Обеспечивают широкий диапазон регулирования, практически
нулевую статическую ошибку по скорости при возмущении по нагрузке ![]() . Если рт-ПИ, а рс-П регулятор, то называют
однократноинтегрирующим: имеют достаточно высокое быстродействие и малое
перерегулирование переходных процессов.
. Если рт-ПИ, а рс-П регулятор, то называют
однократноинтегрирующим: имеют достаточно высокое быстродействие и малое
перерегулирование переходных процессов.
Недостаток: обладает статизмом и имеет меньший диапозон регулирования (вследствие угла наклона механической характеристики).
1) Настройка ПИ регулятора тока на ТО(технический оптимум)
Обычно пренебрегают внутренней обратной связью по ЭДС, т.к. механическая инерционность двигателя больше инерционности преобразователя. Условие:
Для контура тока ![]() токового контура
токового контура
Обычно ![]() ,
тогда можно считать, что
,
тогда можно считать, что ![]() большая,
большая, ![]() - маленькая инерционность. задача
регулятора скомпенсировать большую постоянную времени. Применяют ПИ регулятор
тока с передаточной функцией
- маленькая инерционность. задача
регулятора скомпенсировать большую постоянную времени. Применяют ПИ регулятор
тока с передаточной функцией
Примем, чтобы инерционность![]() =
=![]() , тогда разомкнутый контур тока
, тогда разомкнутый контур тока

Для замкнутого контура:
Для удобства анализа приведем к канонической форме, тогда
 где
где  -резонансная
частота
-резонансная
частота
 -
коэффициент демпфирования характеристика переходного
процесса полностью определяется
-
коэффициент демпфирования характеристика переходного
процесса полностью определяется![]() .
Рекомендуют
.
Рекомендуют ![]() , тогда
переходной процесс апериодический. В технических объектах допустимо небольшое
перерегулирование и небольшая колебательность, поэтому
, тогда
переходной процесс апериодический. В технических объектах допустимо небольшое
перерегулирование и небольшая колебательность, поэтому ![]() в результате получается улучшение
динамики (быстродействия), такой подход к настройке и дал название технический
оптимум. Обычно выбирают
в результате получается улучшение
динамики (быстродействия), такой подход к настройке и дал название технический
оптимум. Обычно выбирают ![]() ,
тогда
,
тогда 
![]() , получим параметры настройки регулятора
тока.
, получим параметры настройки регулятора
тока.
Подставляя , получим  - передаточная функция оптимизированного
контура тока. Получили, что регулятор скомпенсировал большую постоянную времени
объекта и осталась только малая
- передаточная функция оптимизированного
контура тока. Получили, что регулятор скомпенсировал большую постоянную времени
объекта и осталась только малая ![]() . Резонансная
частота(определяет быстродействие), также зависит от
. Резонансная
частота(определяет быстродействие), также зависит от ![]() .
. Частотная характеристика
Частотная характеристика ![]() и имеем
и имеем
![]()
 Для удобства анализа характеристика
переходного процесса примем
Для удобства анализа характеристика
переходного процесса примем ![]()
![]() ,
пользуясь таблицей обратного преобразования Лапласса получим переходный процесс
,
пользуясь таблицей обратного преобразования Лапласса получим переходный процесс
![]()
 - безразмерное время,
- безразмерное время, ![]() - установившийся ток
- установившийся ток
Получим, что при настройке на ТО
имеем небольшое перерегулирование, равное 4.3%, а длительность ПП 4,7![]() , что удовлетворяет большинству
технических процессов. Иногда пренебрегают небольшим перерегулированием, что
позволяет считать процесс апериодическим и упростить передаточную функцию
оптимизированного контура
, что удовлетворяет большинству
технических процессов. Иногда пренебрегают небольшим перерегулированием, что
позволяет считать процесс апериодическим и упростить передаточную функцию
оптимизированного контура
Настройка на ТО эффективна, если
можно пренебречь внутреннее ОС по Е, то есть тогда механические процессы
протекают медленнее, чем электрические и за время нарастания ![]() скорость двигателя изменяется не
значительно.
скорость двигателя изменяется не
значительно.
2). Настройка ПИ регулятора скорости на симметричный оптимум.
Пусть выполнена настройка ПИ
регулятора на ТО и , а в качестве регулятора
скорости, выберем ПИ регулятор с передаточной функ.
 , то W разомкнутого контура скорости
, то W разомкнутого контура скорости 
При настройке на СО параметры РС выбирать:
![]()
Подставим  В результате регулятор
скомпенсировал большую
В результате регулятор
скомпенсировал большую ![]() и динамика определяется только
малой постоянной
и динамика определяется только
малой постоянной ![]()

Наличие значительной форсирующей составляющей в числителе приводит к появлению пика на частотной характеристике.
В область низких частот, когда скорость управляющих воздействий не велика, то
 Оптимизированный контур скорости
можно приближенно представить колебательным звеном с пост. времени
Оптимизированный контур скорости
можно приближенно представить колебательным звеном с пост. времени ![]() и коэффициентом демпфирования
и коэффициентом демпфирования ![]() переходная характеристика
переходная характеристика
![]()
 - безразмерное время
- безразмерное время
Форсирующая составляющая
(числитель в WКС привело к большому
перерегулирования 43%. Время первого достижения установившегося значения
составляет 3, 1![]() .Этот недостаток
перерегулирования можно уменьшить до 8%, если на входе оптимизированного
контура включает апериодический фильтр с пост. времени
.Этот недостаток
перерегулирования можно уменьшить до 8%, если на входе оптимизированного
контура включает апериодический фильтр с пост. времени ![]() , способный скомпенсировать форсирующее
звено контура. В результате пик в частотной характеристике исчезает.
, способный скомпенсировать форсирующее
звено контура. В результате пик в частотной характеристике исчезает.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.