|
1. |
Описание работы механизма |
3 |
|
2. |
Расчет статической мощности и времени выполнения технологических операций за цикл работ |
4 |
|
3. |
Построение скоростной и нагрузочной диаграмм механизма и предварительный выбор мощности электродвигателя |
6 |
|
4. |
Выбор типа электродвигателя и расчет оптимального передаточного числа |
8 |
|
5. |
Расчет и построение упрощенной скоростной и нагрузочной диаграмм электропривода за цикл |
9 |
|
6. |
Предварительная проверка электродвигателя по нагреву и перегрузочной способности |
12 |
|
7. |
Расчет и построение естественной механической и электромеханической характеристик электродвигателя |
13 |
|
8. |
Расчет искусственных механических характеристик обеспечивающих выполнение технологических операций |
14 |
|
9. |
Выбор устройства регулирования |
16 |
|
10. |
Расчет переходных процессов за цикл |
17 |
|
11. |
Окончательная проверка электродвигателя по нагреву и перегрузке |
22 |
|
12. |
Расчет расхода электроэнергии за цикл и циклового КПД |
23 |
|
13. |
Заключение |
24 |
|
Список использованных источников |
25 |
Обширная группа общепромышленных установок циклического действия включает в себя подъемные краны, маятниковые канатные дороги, конвейеры циклического действия, манипуляторы и промышленные роботы. Общим для этих установок является режим работы, при котором технологический процесс состоит из ряда повторяющихся движений.
Подъемные краны объединяют большую группу подъемно-транспортных установок циклического действия. На промышленных предприятиях наиболее распространенными и универсальными подъемно-транспортным устройством является мостовой кран. Основными механизмами мостового крана являются: механизм передвижения моста, механизм передвижения тележки и подъемная лебедка, которые снабжаются индивидуальным электроприводом. Кинематическая схема механизма перемещения представлена на рис. 1.
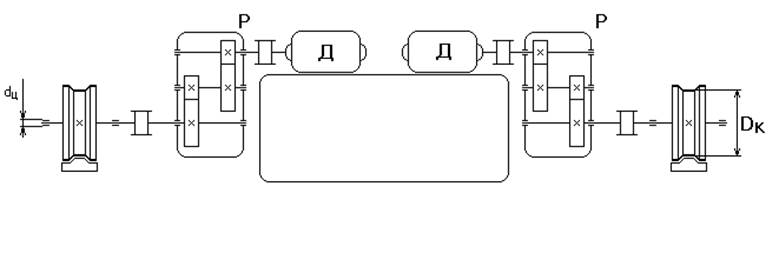
Рис.1. Кинематическая схема передвижения механизма.
Краны опираются на ходовые колеса. Колеса, соединены с приводом. Наличие трансмиссионного вала увеличивает трудоемкость изготовления крана и его массу и требует проведение весьма точного монтажа. Чтобы устранить эти недостатки, применяют раздельный привод концевых балок моста. По вышеприведенной схеме каждая концевая балка моста имеет самостоятельный, не связанный механически привод.
Если на одну из опорных балок моста нагрузка меньше, чем на другую, то частота вращения двигателя на этой опоре несколько увеличивается и опора начинает забегать вперед относительно более нагруженной опоры. Но при этом первый двигатель начинает испытывать передаваемую через металлоконструкцию моста повышенную нагрузку и разгружает двигатель второй опоры, за счет чего частота вращения первого двигателя первого двигателя увеличивается, пока их скорость вращения не уровняется. Т.о. в процессе движения крана с раздельным приводом происходит перераспределение нагрузки между обоими двигателями. Хотя схема механизма с раздельным приводом требует наличия двух двигателей, двух тормозов и двух редукторов, она наиболее дешевле, имеет малую массу и проста в изготовлении.
Механизм с раздельным приводом устанавливается на рабочих площадках около концевых балок. Соединение вала двигателя с выходным валом редуктора осуществляется с помощью промежуточных валов с зубчатыми муфтами, Тормозное устройство может быть прикреплено к редуктору на специальной подставке, или установлено на муфте, соединяющий редуктор с двигателем.
Статическая сила для передвижения механизма мостового крана по горизонтальному рельсовому пути рассчитываем по формуле:
|
|
(1) |
где Кр – коэффициент учитывающий сопротивление от трения реборд о рельсы и трение токосъемников с троллеи. Принимаем Кр = 1,5.
m – перемещаемая масса. При перемещении крана с грузом
![]()
При перемещении крана без груза
![]()
g – ускорение свободного падения. 
m - коэффициент трения скольжения в подшипниках колес. Принимаем m = 0,012
rц – радиус цапфы ходового колеса
![]()
![]() - коэффициент трения
качения ходовых колес. Принимаем
- коэффициент трения
качения ходовых колес. Принимаем ![]() =0,0015м
=0,0015м
Rк – радиус ходового колеса
![]()
Подставив значения в формулу (1) получим статическую силу для перемещения с грузом:

и без груза:

Статическая мощность для передвижения механизма рассчитывается по следующей формуле:
|
|
(2) |
По формуле (2) рассчитываем статическую мощность для передвижения крана с грузом:
![]()
Статическую мощность при передвижении крана без груза:
![]()
Время перемещения крана в одном направлении определяем по следующей формуле:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.