1. Технологическое описание механизма, его особенности,
кинематическая схема.
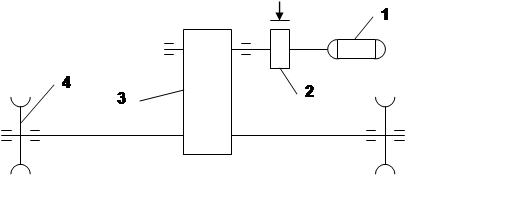 |
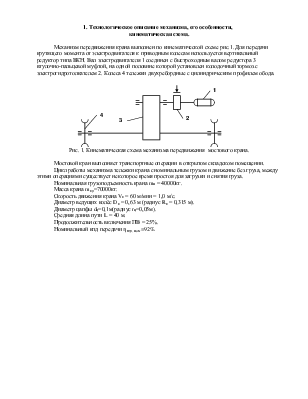
Рис. 1. Кинематическая схема механизма передвижения мостового крана.
Мостовой кран выполняет транспортные операции в открытом складском помещении.
Цикл работы механизма тележки крана с номинальным грузом и движение без груза, между этими операциями существует некоторое время простоя для загрузки и снятия груза.
Номинальная грузоподъемность крана mн = 40000кг.
Масса крана mкр=70000кг.
Скорость движения крана Vк = 60 м/мин = 1,0 м/с.
Диаметр ведущих колёс Dк = 0,63 м (радиус Rк = 0,315 м).
Диаметр цапфы dц=0,1м(радиус rц=0,05м).
Средняя длина пути L = 40 м.
Продолжительность включения ПВ = 25%.
Номинальный кпд передачи hпер. ном=92%.
2. Расчет и построение нагрузочной диаграммы механизма.
Выбор мощности двигателя основан на расчете усилий, возникающих в механизме и построение нагрузочной диаграммы механизма М = f(t).
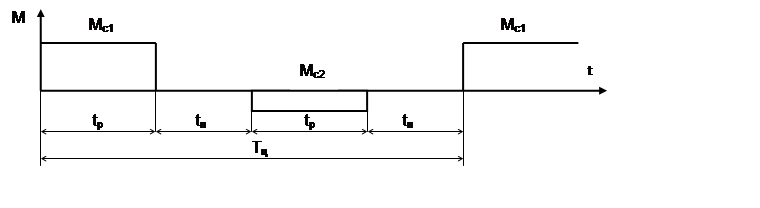
Изобразим нагрузочную диаграмму, которую должен выполнять заданный механизм для выполнения технологического цикла.
Кран перемещает поперечно в одном направлении сначала массу m1 в течение времени tp1, а затем массу m2в течение времени tp2. Причем tp1 = tp2 = tp. Между перемещениями грузов имеются равные паузы tп для снятия и загрузки груза. Тогда нагрузочная диаграмма будет иметь вид рис. 2.
Массы m1 и m2 находим как:
m1 = mн + mкр = 40000+70000=110000 кг,
m2 = mкр = 70000 кг.
 |
Время работы tp определим по величине перемещения L и номинальной скорости крана vн.
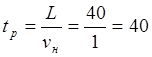 с. (1)
с. (1)
Цикл tц определяется временем, после которого процесс повторяется.
 с.
с.
Времена пауз tп определяем по исходным данным механизма как:
 120с. (2)
120с. (2)
Cуммарное время пауз
åto=tц-2× tp=320-2×40=240c.
Определим мощности нагрузочной диаграммы. Схема приложения усилий для мостового крана представлена на рис. 3.
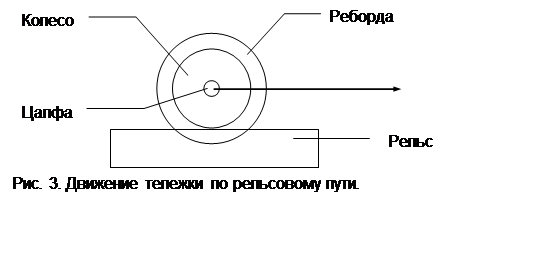 |
Усилие в этом случае определяется по формуле:
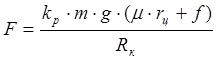 , (3)
, (3)
где m – суммарная масса перевозимого груза, кг;
Rк– радиус ходового колеса, м;
m - коэффициент трения качения в подшипниках колес (принимаем m= 0,01);
f– коэффициент трения качения ходовых колес (принимаем f = 1 × 10-3);
kp – коэффициент, учитывающий сопротивление от трения реборд о рельсы
(принимаем kp = 1,5);
rц – радиус цапфы ходового колеса, м.
Для
перемещения крана с грузом по (3) определяем F1
 Н.
Н.
Для
перемещения крана без груза по (3) определяем F2
 Н.
Н.
При известной скорости vн передвижения механизма, статическая мощность передвижения определяется как
![]() . (4)
. (4)
Подставляя в (4) численные значения, получаем:
Рс 1 = F1 × vн = 7700 × 1,0 = 7700 Вт,
Рс 2 = F2 × vн = 4900 × 1,0 = 4900 Вт.
hпер- КПД передачи, величина которого зависит как от кинематической цепи, так и от величины загрузки и определяется как
 , (5)
, (5)
где hпер. ном- номинальный КПД кинематической схемы, равный произведению её отдельных элементов;
a - коэффициент, принимаемый равным 0,08;
kз– коэффициент загрузки
 , (6)
, (6)
Здесь m – полная перемещаемая масса;
mном– номинальная масса груза;
mмex– масса механизма.
Номинальный КПД кинематической схемы рис. 1 будет включать потери в двухступенчатом редукторе 3, а также в подшипниках колес крана, т.е.
hпер. н = 0,92.
Для случая перемещения крана с грузом коэффициент загрузки по (6) находим как
 , тогда по (5)
, тогда по (5)
 ,
,
Аналогично определяем параметры для режима перемещения крана без груза:
 , тогда по (5)
, тогда по (5)
 ,
,
По результатам расчета строим нагрузочную диаграмму.
Рис.4 Нагрузочная диаграмма механизма.
По нагрузочной диаграмме Pс = f(t), определяем эквивалентную мощность
 Нм. (7)
Нм. (7)
3. Предварительный выбор мощности двигателя
по нагрузочной диаграмме механизма.
Определяем мощность двигателя с учетом коэффициента запаса
 Вт,
(8)
Вт,
(8)
где коэффициент Кзап=1,35 учитывает дополнительный нагрев двигателя за время переходных процессов, который не учтён при предварительном выборе мощности двигателя.
Рассчитанную мощность при реальном ПВ приводим к мощности при стандартном ПВст.=40%
 Вт.
Вт.
По каталогу, в соответствии с принятым Ррасч., выбираем двигатель так, чтобы Рн ³ Ррасч
![]() Вт.
Вт.
Выбираем серию MTF(H) – крановый электродвигатель переменного тока с фазным ротором по условию Jд×nн2=min.
|
Тип двигателя |
nн, об/мин |
Jд, кг×м2 |
Jд×nн2 |
|
4MTF(H)160L6B6 |
930 |
0,28 |
242172 min |
|
4 MTF(H)200L8 |
710 |
0,62 |
312542 |
Параметры выбранного двигателя из каталога [1]:
Тип 4MTF(H)160L6B6
- номинальная мощность Рн = 15 кВт,
- номинальное напряжение Uн = 380/220 В,
-
номинальная скорость nн=930 об/мин,  рад/с,
рад/с,
- номинальный кпд hн=81%,
-
номинальный момент  Нм,
(9)
Нм,
(9)
- момент инерции двигателя Jд = 0,28 кг×м2,
- номинальный ток статора I1н=39А,
- коэффициент мощности cosjн=0,77,
- максимальный момент Мmax=460Н×м,
- номинальный ток фазы ротора I2н=48А,
- активное сопротивление фазы обмотки статора R1=0,236 Ом,
- активное сопротивление фазы обмотки ротора R2=0,073 Ом,
- ток холостого хода I0=25,6A,
- коэффициент мощности при холостом ходе cosj0=0,1,
- индуктивное сопротивление статора X1=0,42 Ом,
- индуктивное сопротивление ротора X2²=0,67 Ом,
- коэффициент трансформации Kr=Ke2=2,89,
- коэффициент рассеяния s1=1,051.
Угловая скорость колеса будет
 рад/с.
(10)
рад/с.
(10)
Передаточное число редуктора
jопт .
(11)
.
(11)
Строим нагрузочную диаграмму Mс = f(t),перейдя от диаграммы
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.