нашем случае, буёк будет представлять полый стальной цилиндр, покрытый сверху фторлоном-3(так как необходимо измерять уровень агрессивной среды).
Рассчитаем основные характеристики буйка:
. Рис 3.2.Чувствительный элемент буйкового уровнемера.
Рис 3.2.Чувствительный элемент буйкового уровнемера.
На буёк находящийся в жидкости будут действовать сила тяжести и выталкивающая сила (сила Архимеда). Спроектируем их на ось Х.
Рис 3.3.Основные силы, действующие на буек, погруженный в жидкость.
G=FT – FA;
FT=mжg;
![]() ;
;
Для определения FT необходимо найти массу буйка. Зададимся размерами буйка:
НБ=1м;
dБ=0,04м.
Так как нам необходимо измерять уровень агрессивной
среды(кислоты), то наш буёк будет покрыт фторлоном-3(![]() ).
Толщина покрытия будет равна 1мм. Определим массу фторлона-3:
).
Толщина покрытия будет равна 1мм. Определим массу фторлона-3:
 .
.
Внутренняя часть буйка будет изготовлена из стали(![]() ).
).
Внутри буёк будет полым. Толщину стенки возьмём 2мм.
Определим массу стали:
 .
.
![]() кг.
кг.
G= mжg+
![]() - статическая
характеристика ПИП.
- статическая
характеристика ПИП.
G=B-K0h;
B=2,87*9,8=28,1Н;
K0= .
.
G=28,1-17,2h;
Строим статическую характеристику ПИП.
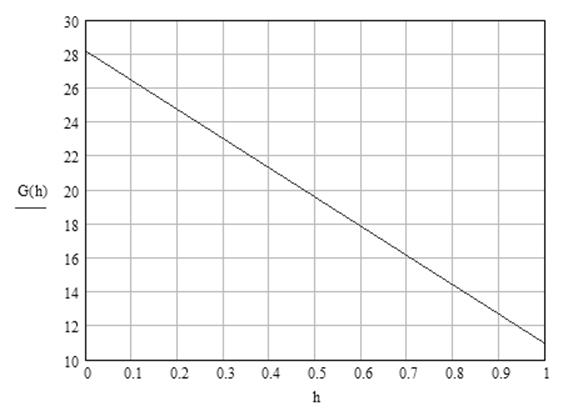
Рис 3.4.Статическая характеристика чувствительного элемента.
Диапазон изменения усилия на рычаге будет составлять от 11,2Н до 28,1Н.
Рассчитаем чувствительность:
 ;
;
Динамическая характеристика ПИП.
Буйковые измерители уровня в динамическом отношении эквивалентны колебательным звеньям. Их передаточная функция выглядит следующим образом:
 ;
;
![]() -
перемещение буйка, м;
-
перемещение буйка, м;
![]() - изменение
уровня жидкости, м;
- изменение
уровня жидкости, м;
T1,T2 – постоянные времени буйкового измерителя уровня, с;
K=1;
 ;
;
S- площадь поперечного сечения буйка;
m – приведённая масса буйка;
 ;
;
![]() - коэффициент
вязкого трения;
- коэффициент
вязкого трения;
 ;
;
Строим динамическую характеристику:
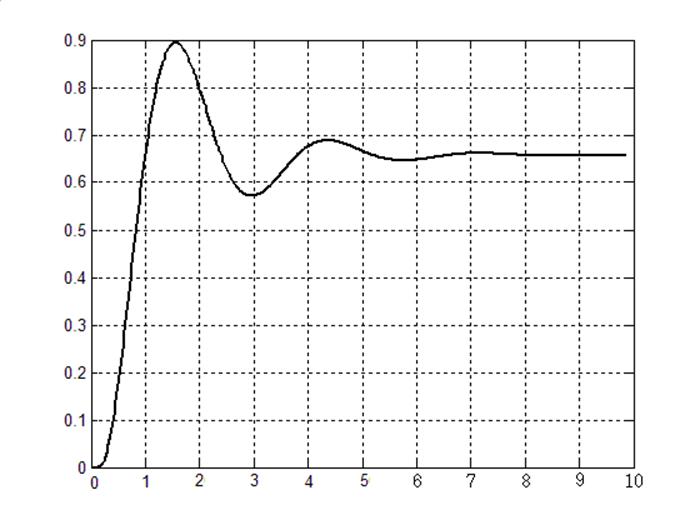
Рис 3.5.Динамическая характеристика чувствительного элемента.
Определим величину противовеса:
M1=M2;
![]() ;
;
l1=1,5м;
l3=2м;
 ;
;
Вес противовеса будет равен:
 .
.
Для преобразования изменения уровня в токовый сигнал используем преобразователь “сила-ток”.
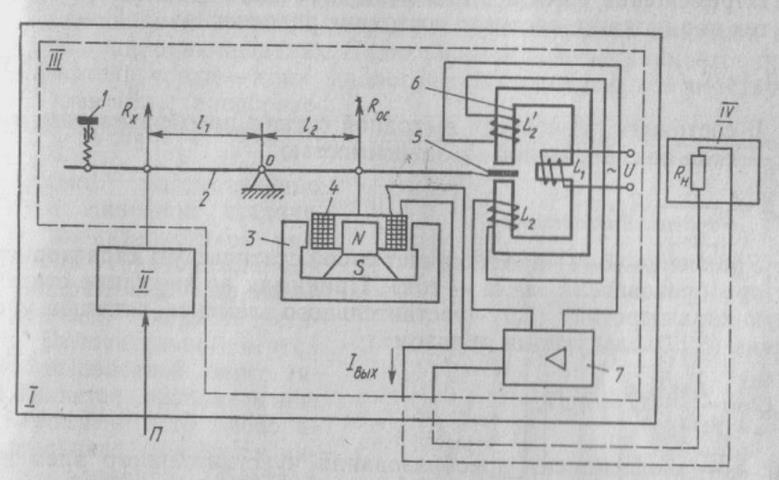
Рис 4.1.Схема электрической системы передачи измерительной информации с преобразователем “сила-ток”.
В
основу работы ПИП, оснащённых преобразователями “сила-ток”, положен принцип
силовой компенсации. ПИП включает чувствительный элемент ![]() и преобразователь “сила-ток”
и преобразователь “сила-ток” ![]() .
.
Измеряемая
величина h преобразуется
чувствительным элементом ![]() в усилие
в усилие ![]() . Это усилие через рычаг 2 уравновешивается
усилием обратной связи
. Это усилие через рычаг 2 уравновешивается
усилием обратной связи ![]() , развиваемым
магнитоэлектрическим преобразовательным элементом. Магнитоэлектрический преобразовательный
элемент состоит из стержневого постоянного магнита NS с П-образным
магнитопроводом 3,в зазоре между постоянным магнитом NS и
магниторповодом расположена круглая рамка 4, жестко закреплённая на рычаге 2.
Обмотка рамки соединена с выходом электронного усилителя 7. Вход электронного
усилителя соединён со вторичными обмотками L2 и L2’
индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде
дифференциально-трансформаторного преобразователя, на первичную обмотку L1 которого подаётся питание с электронного усилителя.
, развиваемым
магнитоэлектрическим преобразовательным элементом. Магнитоэлектрический преобразовательный
элемент состоит из стержневого постоянного магнита NS с П-образным
магнитопроводом 3,в зазоре между постоянным магнитом NS и
магниторповодом расположена круглая рамка 4, жестко закреплённая на рычаге 2.
Обмотка рамки соединена с выходом электронного усилителя 7. Вход электронного
усилителя соединён со вторичными обмотками L2 и L2’
индикатора перемещения 6 рычага 2. Индикатор перемещения выполнен в виде
дифференциально-трансформаторного преобразователя, на первичную обмотку L1 которого подаётся питание с электронного усилителя.
При
изменении значения h равновесие рычажной системы нарушается, что приводит
к перемещению рычага и укреплённого на нём сердечника 5 из магнитомягкого материала.
Перемещение сердечника преобразуется индикатором перемещения 6 в
электрический сигнал ![]() , который поступает на вход
электронного усилителя 7. Последний усиливает и преобразует
, который поступает на вход
электронного усилителя 7. Последний усиливает и преобразует ![]() в ток Iвых , подаваемый в линию связи и на вход элемента
обратной связи – магнитоэлектрического преобразовательного элемента. При протекании
тока Iвых по
катушке 4 магнитоэлектрического преобразовательного элемента формируется сила :
в ток Iвых , подаваемый в линию связи и на вход элемента
обратной связи – магнитоэлектрического преобразовательного элемента. При протекании
тока Iвых по
катушке 4 магнитоэлектрического преобразовательного элемента формируется сила :
Rос=BnlIвых ,
B – магнитная индукция;
l – средняя длина витка катушки;
n – число витков катушки.
Перемещение рычага 2 под действием сил Rx и Roc происходит до тех пор пока не наступит равновесие :
![]() ;
;
В состоянии равновесия выходной сигнал преобразователя “сила-ток” связан с Rx зависимостью
 статическая
характеристика преобразователя “сила-ток”
статическая
характеристика преобразователя “сила-ток”
В свою очередь Rx=b-K0h следовательно

 - коэффициент
преобразования ПИП;
- коэффициент
преобразования ПИП;
![]() - коэффициент
преобразования чувствительного элемента;
- коэффициент
преобразования чувствительного элемента;
 ;
;
Путём изменения коэффициента
Кп можно изменять диапазон измерений преобразователя в пределах ![]() (10-20)%.
(10-20)%.
Для ПИП с диапазоном измерений hmin-hmax статическая характеристика имеет вид:
 ,
если диапазон изменения выходного сигнала 0-5 мА.
,
если диапазон изменения выходного сигнала 0-5 мА.
K0=17,2;
Kп=5;
;
Принимаем плечи l1=l2=1,5м.
Найдём значения B,l,n.
B=0,5Тл;
l=0,1м;
n=69.
Найдём значения Iвых при минимальном и максимальном значениях уровня:
 ;
;
 .
.
Для получения
унифицированного сигнала 0![]() 5В воспользуемся
следующей схемой на операционных усилителях:
5В воспользуемся
следующей схемой на операционных усилителях:
Рис 4.2. Схема для получения унифицированного сигнала.
Rн = R2 =1кОм;
Uоп = -3,15В;
Uвых = 0![]() 5В.
5В.
Для регистрации аналогового сигнала с выхода нормирующего
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




