 (2.13)
(2.13)
Значения ![]() ,
, ![]() для каждого канала управления
определяются по следующим формулам
для каждого канала управления
определяются по следующим формулам
 (2.14)
(2.14)
 (2.15)
(2.15)
где
![]() –момент нулевого порядка
корреляционной функции;
–момент нулевого порядка
корреляционной функции;
![]() ,
,![]() –соответственно моменты нулевого и первого
порядка взаимокорреляционной функции.
–соответственно моменты нулевого и первого
порядка взаимокорреляционной функции.
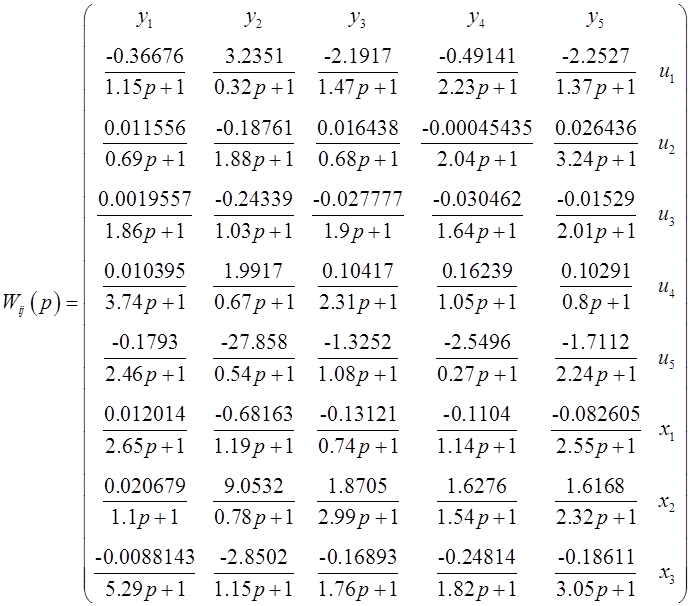
По формулам (2.13), (2.14) и (2.15) были рассчитаны
параметры передаточной функции (2.8) ![]() ,
, ![]() для всех каналов управления. Таким образом, характеристическая
матрица (2.1) для данного объекта управления имеет вид:
для всех каналов управления. Таким образом, характеристическая
матрица (2.1) для данного объекта управления имеет вид:
 (2.16)
(2.16)
По матрице (2.16) можно определить передаточную
функцию по любому каналу управления (![]() ) на пересечении соответствующего
) на пересечении соответствующего ![]() -й строки и
-й строки и ![]() -го столбца матрицы.
-го столбца матрицы.
2.2. Рассмотрение объекта на наличие нелинейности
Технологические объекты и другие звенья системы автоматического регулирования могут содержать .нелинейные элементы. И в линейных регуляторах имеются области с нелинейной характеристикой, например за пределами зоны пропорциональности, которые не принимались во внимание. Если же эти области учитываются, их следует связать с другими основными нелинейностями контура регулирования.
Нелинейные характеристики систем регулирования определяются самими объектами, датчиками и регулирующими клапанами. Для каждой системы нелинейные характеристики элементов компенсируются таким образом, чтобы коэффициент передачи контура регулирования был постоянным. .Это обеспечивает работоспособность схемы регулирования при различных условиях протекания процесса. Компенсация нелинейности осуществляется, как правило, регулятором, выполняющим функции линеаризующего устройства.
Наиболее распространенным примером датчика с нелинейной характеристикой может служить дифманометр, используемый при измерении расхода жидкости по перепаду давления потока. Выходная величина дифманометра изменяется в зависимости от квадрата расхода жидкости, проходящей через сужающее устройство.
При нелинейной характеристике датчика контур регулирования будет по-разному работать при различных расходах жидкости. Если диапазон пропорциональности регулятора настроить на требуемое демпфирование колебаний контура при 50%-ном расходе жидкости, то при 100%-ном расходе колебания в контуре регулирования будут затухать медленно, а при расходе, близком к нулю, система будет плохо реагировать на возмущения. Это может быть легко устранено введением в конструкцию датчика устройства для извлечения квадратного корня, которое линеаризует зависимость выходного сигнала датчика от расхода жидкости.
Нелинейная зависимость между перепадом давления на диафрагме и расходом приводит к тому, что при изменении расхода степень устойчивости системы регулирования изменяется . Увеличение коэффициента усиления обьекта с увеличением расхода теоритически может быть скомпенсировано, если эффективное значение коэффициента усиления клапана будет изменяться обратно пропорционально расходу. Практически клапана с такой характеристикой не существует. Если требуется обеспечить качественное регулирование расхода при условии, что его значение может изменяться более чем вдвое, то для получения сигнала, пропорционального расходу, необходимо использоватьпреобразователь, осуществляющий операцию извлечения корня. Безусловно, указанная нелинейность отсутствует, если в качестве датчика иснользуется магнитный расходомер.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.