Первый подход регулирования расхода воды можно осуществить при помощи регулирующего клапана, установленного на трубопроводе.
Дополнительные параметры находим из справочной литературы:
Плотность воды при 90С0 ρ=962 кг/м3;
Динамическая вязкость при 90С0 ν=0,00328 см2/с.
где Qmax – максимальный расход;
ρ – плотность воздуха;
Δ Pvs-потери на клапане.
Обычно потери давления на клапане составляют 25-33% от потерь в системе, тогда Δ Pvs составляет приблизительно 0,3 от Δ PL:
Δ Pvs=0,3.5,5=1,65 кгс/см2
тогда 
По КVS = 7,6 м3/ч выбирается клапан:
Выбираем односедельный клапан седельный VВ2 имеющий Dy=20 мм и Kvs=20 и управляется сигналом из контроллера (0-10В или 4-20мА).
Определяем число Рейнольдса для клапана:
![]()
Re=53963
Так как Re>2000, то влияние вязкости на расход не учитываем и выбранный РО проверяем на возможность возникновения кавитации:
Определим коэффициент сопротивления РО
e=25.4*F2/K2
По графику определяем коэффициент кавитации:
Коэффициент кавитации равен 0,6
Теперь определим перепад давления, при котором возникает кавитация:
Допустим, что абсолютное давление перед клапаном составляет 10бар=1МПа
Давление насыщенных паров воды при температуре 90С0 составляет 0,07МПа. Тогда:
ΔP=0,6(1-0,07)=0,558
По результатам расчета видно, что выбранный РО обеспечит максимальный расход.
Второй подход по реализации регулирования расхода воды в системе можно осуществлять посредством управления частотой вращения насоса.
Насосы нашли самое широкое применение как источники энергии в машинах и механизмах, эксплуатируемых в химическом производстве. Насосы являются источником подачи жидкостей. Из многочисленных фирм, компаний и групп, занятых производством и реализацией насосов на российском рынке строительной техники следует отметить Atlas Copco, F. G. Wilson (Engineering) Ltd, Hyundai Heavy Industry, Indersoll-Rand, Dari, Fiac и Fini. Основными техническими характеристиками насосов являются:
- величина создаваемого напора (атм);
- производительность по всасыванию или (наиболее часто) по нагнетанию (м3/мин, л/мин);
- мощность силовой установки (кВт);
- габариты и масса насоса.
Применяем 2 параллельно включенных насоса UPS-32-30f напряжение питания 380 В, 50 Гц.
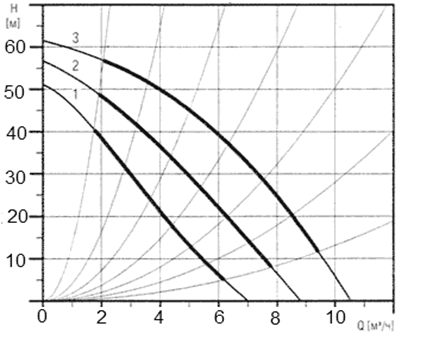
Рисунок 16. Расходно-напорная характеристика насоса (линия №2).
При сумировании потерь на клапане (0,6 бар) и потерь на линии (2бар) получим давление 2,6 Атм. Таким образом 2 насоса создадут необходимую подачу при данном напоре.
Мощность 5 кВт.
Выбираем частотный привод:
Mitsubishi FR-F700.
Мощность 7.5 кВт.
Диапазон частоты 0,5-400Гц.
Задание 4
Подобрать параметры ПИД-регулятора локальной системы регулирования с нелинейными звеньями путем моделирования в программе MATLAB.

Рис.17

N1-нелинейное звено с параметрами: Ам=±1,05/Ко, где Ко - общий коэффициент передачи объекта без регулятора и обратной связи; зоной нечувствительности Δ=0,04, N2 – звено, которое отображает статическую характеристику автоматического клапана, рассчитанного в задании №3.
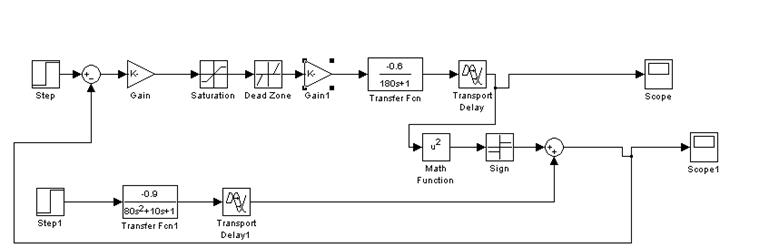
Рис.18
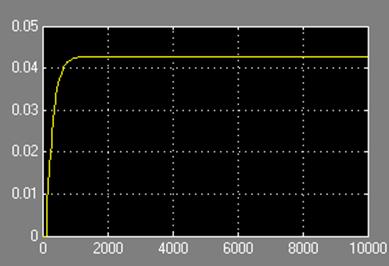
Рис.19
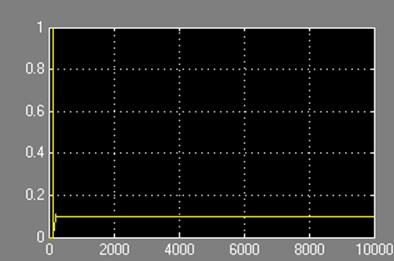
Рис.20
Автоколебания в данной системе не происходят ввиду наличия в звене W2 отрицательного коэффициента в числителе. Менять коэффициент Кр в регуляторе на отрицательный также нет смысла, так как в системе присутствует функция возведения в квадрат.
Задание 5
Путем анализа переходного процесса релейного регулирования необходимо обеспечить среднее значение температуры Тср = 376.5оС с учетом возможных отклонений по причине погрешности выбранного измерительного комплекта. Подсчитать количество переключений управляющего реле за час, температуру включения и выключения нагрева.
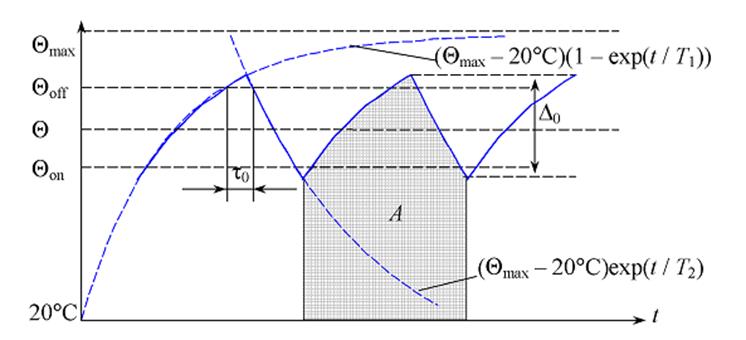
Рис.21
Qmax=400оС;
Q=353оС;
Т1=60с;
Т2=240с;
Δ=6%;

Δo=Δ . Tcp; Δo=6.376.5/100=22.6;
Qon = 376.5-22.6/2=353.9oC;
Qoff = 376.5+22.6/2=399oC;
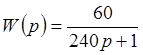
Передаточная функция объекта:
Структурная схема имеет вид:
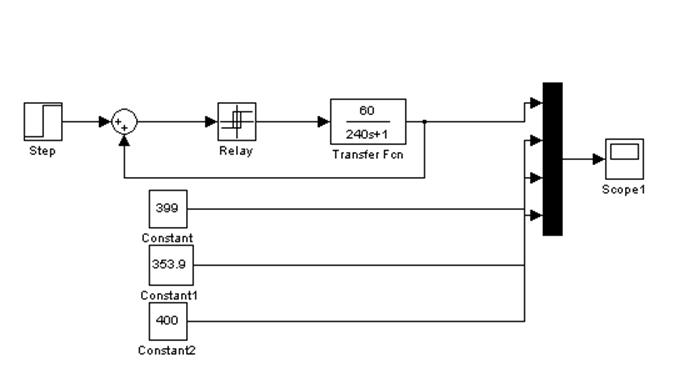
Рис.22
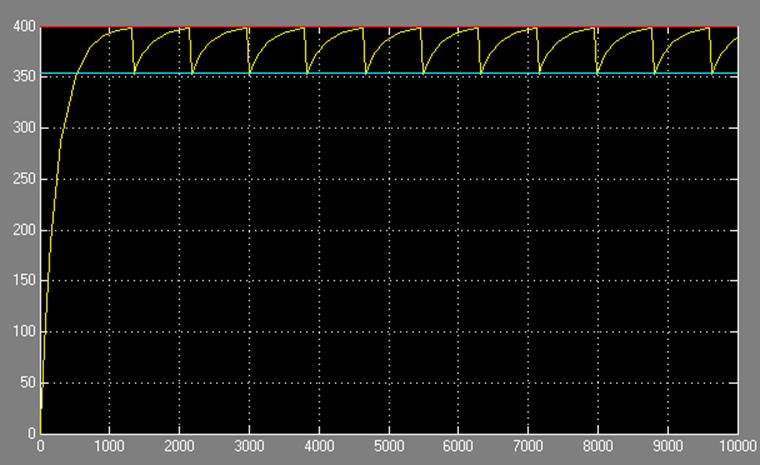
Рис.23 Переходный процесс системы
Литература:
1. Д.А.Гринюк “Автоматизация технологических процессов отросли”.-Мн 2008.
2. В.Ф.Комиссарчик “Автоматическое регулирование технологических процессов”-Тв-2001.
3. А.С. Клюев “Наладка средств автоматизации и автоматических систем регулирования”-М-1989.
4. И.Ф. Кузьмицкий “Теория автоматического регулирования” БГТУ Минск 2006
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.