 Рис.2
Рис.2
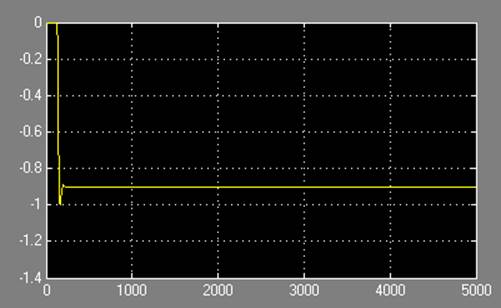
Рис.3
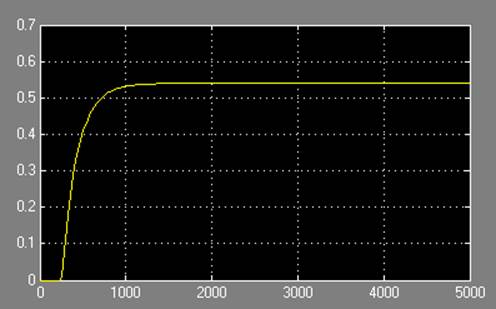
Рис.4
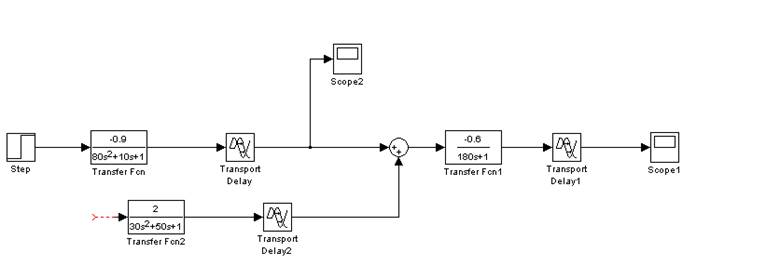
Далее преобразуем схему следующим образом:
Расчет каскадного контура произведем на желаемую степень колебательности М = 1,1.
С учетом ![]() получим:
получим:
clc, clf, clear;
ww=tf([-0.9], [80 10 1], 'td', 64);
figure(1);
nyquist(ww);
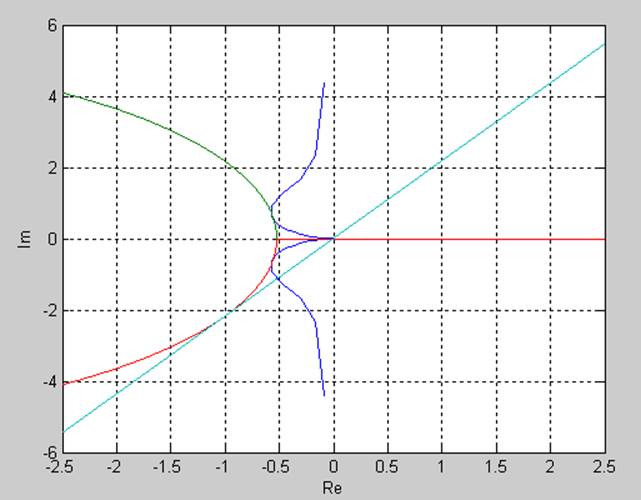
M=1.1;
w=0:0.001:2;
kp=-1.63;
Tpd=-0.0001;
p=j*w;
www=(kp.*1+Tpd./p)*(-0.6).*exp(-114.5*p)./(80*p.^1+10*p+1);
Re=real(www);
Im=imag(www);
R=M/(1-M^2);
p=j*w;
C=M^2/(1-M^2);
x=-1:0.005:0;
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
k=tan(asin(1/M));
y3=k*x;
figure(2);
plot(Re, Im, x, y1, 'r', x, y2, 'r', x, y3);
grid on;В результате вычислений получим следующие результаты:
Принимаем :
Kp=-1.63
Ti=-0,0001
Отсюда следует, что нам необходимо использовать ПИ регулятор.
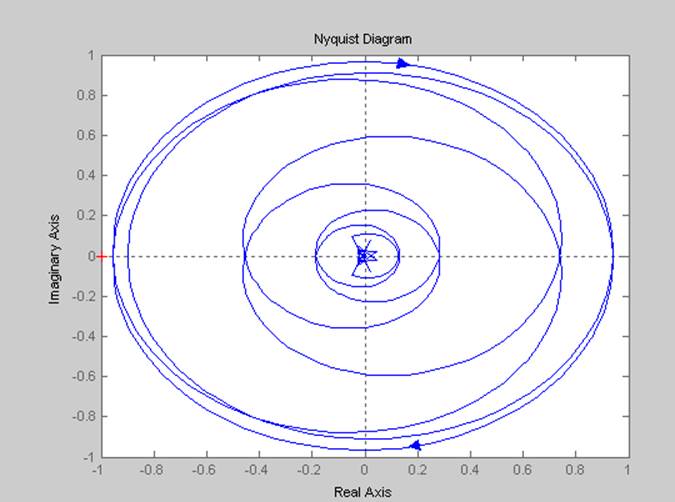
Рис.5 Проверка устойчивости системы без регулятора
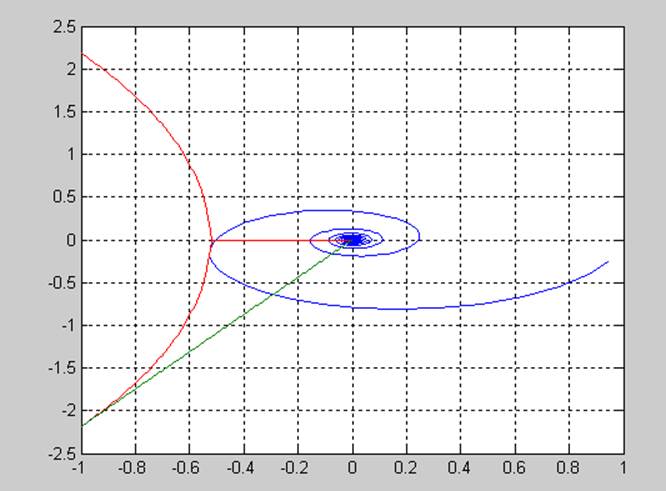
Рис.6
Теперь промоделируем систему с регулятором рисунок 7.
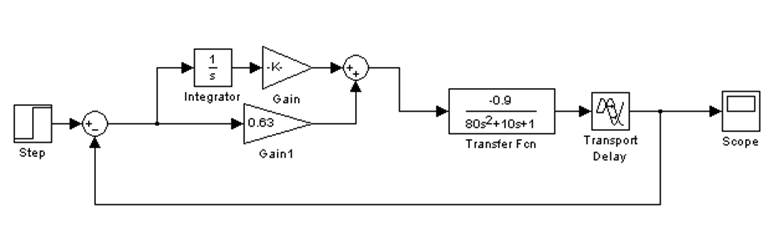
Рис.7
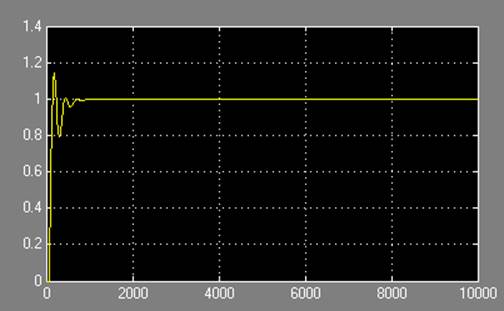
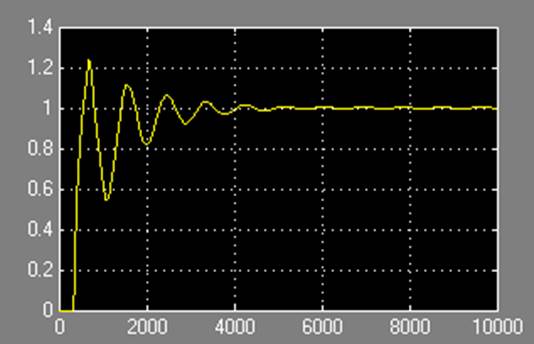
Рис.8
Переходный процесс системы с ПИ-регулятором
Далее преобразуем схему следующим образом:
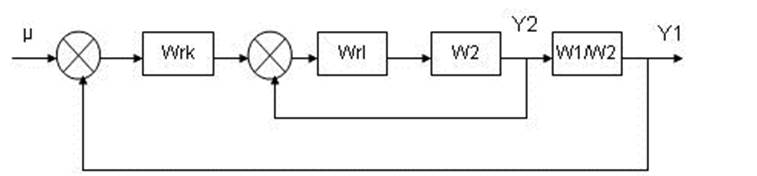
Рис.9
Расчет каскадного контура произведем на желаемую степень колебательности М = 1,1.
С учетом ![]() получим:
получим:

w1=w11*w222;
w12=w1/w2
wr=tf([-0.63 -0.0001],[1 0])
%Ws=wr*w2*w12
ws=((w2*wr)/(1+w2*wr))*w12
[g v]=tfdata(w12,'g')
nyquist(ws)
M=1.1
w=-2.5:0.0005:2.5;
s=i*w;
Kp=-1.4; Ti=0;
Td=-0.001
W=(Kp+Td.*s+1/ Ti.*s).*(( 1.445e008*s.^6 + 4.153e006*s.^5 + 4.418e004*s.^4 + 207.3*s.^3 + 0.372*s.^2 + 5.4*s+0)./(2.335e012*s.^9 + 3.789e011*s.^8 + 4.14e010*s.^7 + 1.265e019*s.^6 + 1.795e007*s.^5 + 1.349e005*s.^4 + 525.2*s.^3 +0.8419*s.^2+3.6*s));
re=real(W); im=imag(W);
R=M/(1-M^2);
C=(M^2)/(1-M^2);
y1=sqrt(R^2-(w-C).^2);
y2=-sqrt(R^2-(w-C).^2);
k=tan(asin(1/M));
y3=k*w;
figure(2);
plot(re,im,w,y1,w,y2,w,y3), grid
xlabel('Re')
ylabel('Im')
В результате вычисления получим:
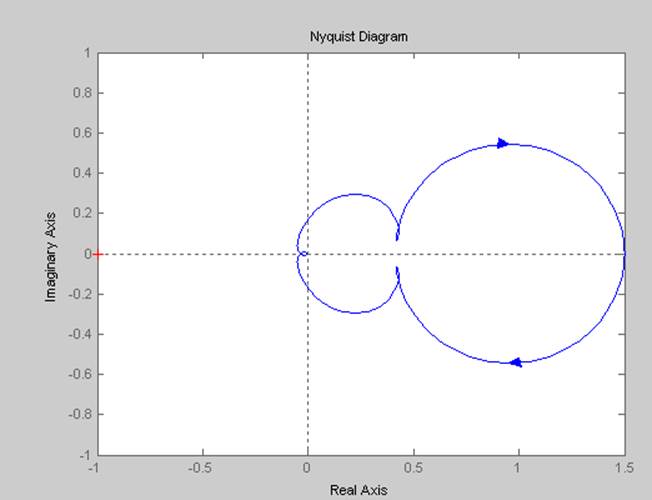
Рисунок 10. Проверка устойчивости системы без регулятора
,
При подборе настроек регулятора, получим (рис 11):
Теперь промоделируем систему в пакете Matlab Simulink (Рис 12):
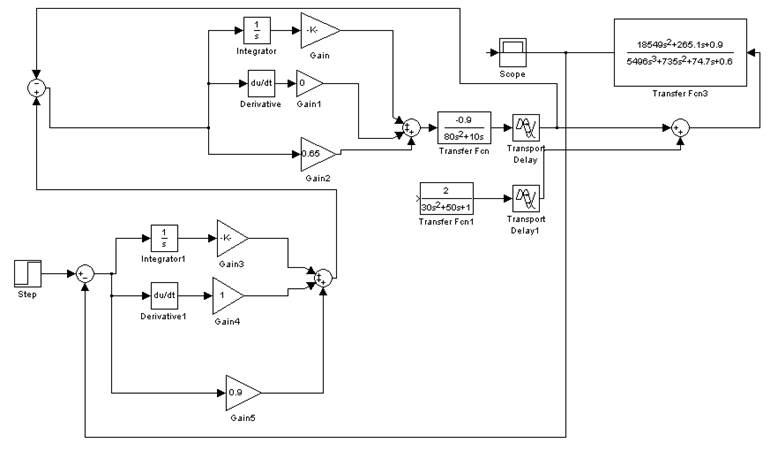
Рисунок 12. Модель каскадной системы
В результате моделирования получим переходный процесс (рис 13):
Определение параметров качества переходных характеристик:
clc, clear
kp=0.05; kd=0.1; kp2=-0.9; ki2=-0.0022; kp=-0.09; kd=-0.0022;
sum('kask1')
% поиск интегральных ошибок
A1=trapz(yy(:,1),(1-yy(:,3)).^2);
A2=trapz(yy(:,1),(1-yy(:,2)).^2);
A3=trapz(yy(:,1),(1-yy(:,4)).^2);
B1=trapz(yy(:,1),abs(1-yy(:,3)).*yy(:,1).^2);
B2=trapz(yy(:,1),abs(1-yy(:,2)).*yy(:,1).^2);
B3=trapz(yy(:,1),abs(1-yy(:,4)).*yy(:,1).^2);
% Перерегулирование
M1=max((yy(:,3)))
M2=max((yy(:,4)))
i=length(yy(:,1));
while abs((1-yy(i,3)))<0.03,
i=i-1;
end
% k=(yy(i+1.3)-yy(i,3))/(yy(i+1.1)-yy(i,1));
% b=abs(1-yy(i,3))-k*yy(i,1); tp1=(0.03-b)/k
% i=length(yy(:,1));
% while abs(1-yy(i,4))<0.03
% i=i-1
% end
% k=(yy(i+1.4)-yy(i,4))/(yy(i+1.1)-yy(i,1));
% b=abs(1-yy(i,4))-k*yy(i,1); tp2=(0.03-b)/k
figure(1)
plot(yy(:,1),yy(:,2),yy(:,1),yy(:,3),yy(:,1),yy(:,4));grid
% Среднеквадратичное отклонение
[A1/A2 A2/A2 A3/A2]
% % Относительное изменение интегрального критерия
[B1/B2 B2/B2 B3/B2]
[M1 M2]
M1 = 1.1262
M2 = 1.1373
[A1/A2 A2/A2 A3/A2]
ans = 0.0634 1.0000 0.0593
[B1/B2 B2/B2 B3/B2]
ans = 0.0390 1.0000 0.0211
Расчет компенсатора для локальной системы управления
На работу всех систем автоматического управления оказывают влияние непрерывно меняющиеся внешние условия, параметры самой системы и другие факторы. В этом случае стоит задача нейтрализации возмущающих воздействий. Обычно эту задачу решают путем введения второго, компенсирующего возмущение канала и отысканием параметров компенсатора.
Рассмотрим структурную схему заданной системы (рис.16). Система будет полностью инвариантна, если компенсирующее звено Wk(р) нейтрализует заданное возмущение .
![]() =
=
Рассчитаем компенсатор:

Промоделируем систему:
Рисунок 14
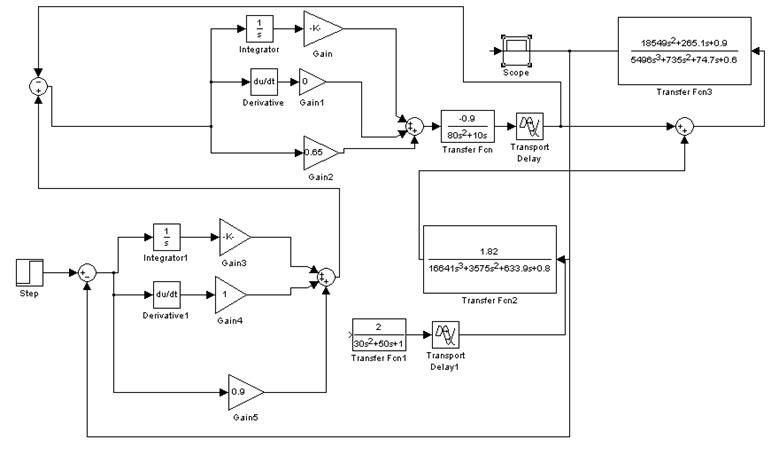
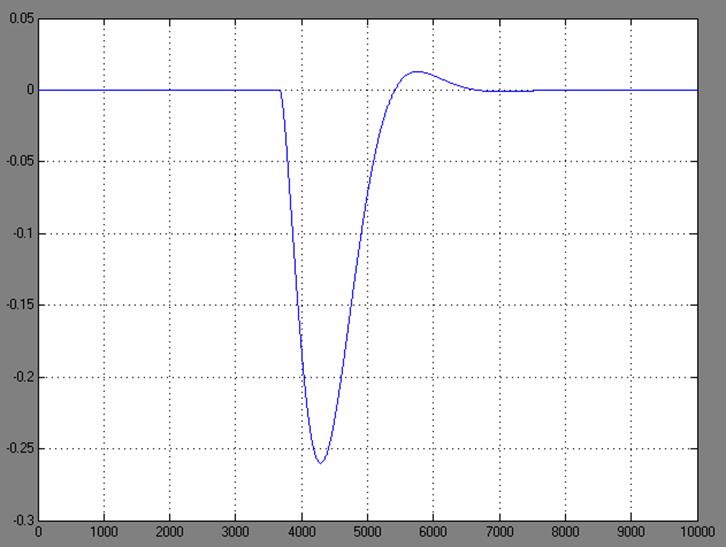
Рисунок 15
По полученным результатам видно, что после воздействия на систему возмущения, компенсатор Wk(р) возвращает ее к исходному состоянию с меньшей погрешностью, чем без компенсатора, следовательно, разработанный компенсатор подходит к данной системе.
Задание 3
Разработать два подхода по реализации воздействия от регулятора для регулирования расхода воды с параметрами: максимальный расход Qmax=25м3/ч; минимальный расход Qm=20м3/ч; номинальный расход Qn=10м3/ч; перепад давления в линии при максимальном значении расхода ΔРL=5.5кгс/см2; температура воды Т=90оС; логарифмически-линейная расходная характеристика.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.