3 Синтез системы автоматического управления технологическим процессом ПРавильно
3.1 Расчет и выбор элементов системы управления
Анализ технологического процесса как объекта автоматического регулирования предлагает оценку его статических и динамических свойств по каждому каналу из каналов от любому возможного управляющего воздействия к любому возможному регулируемому параметру, а также оценку аналогичных характеристик по каналам связи регулируемых переменных с составляющими вектора возмущений. В ходе такого анализа необходимо выбрать структуру системы регулирования, т.е. решить, с использованием какого регулирующего воздействия следует управлять тем или иным параметром состояния.
Обжиг керамического кирпича в туннельной печи относится к таким технологическим процессам, осуществление которых в промышленных масштабах без использования комплексной автоматизации не представляется возможным. Большие скорости газовых потоков, значительные температуры требуют применения многочисленных приборов автоматического контроля и регулирования, а также системы аварийных предупредительных сигнализаций и защитных блокировок.
Для технической реализации системы автоматизации процесса обжига керамического кирпича в туннельной печи необходимо использовать микропроцессорный контроллер, который обладает для этого достаточной информационной и вычислительной мощностью.
Для регулирования подачи газа к горелкам в качестве регулирующих органов применяют клапаны. Эти устройства по принципу действия являются переменными пневмо-сопротивлениями, регулирующими расход вещества путем дросселирования, т. е. изменения проходного сечения регулирующего органа.
Датчики температуры должны быть работоспособны в условиях влажной и агрессивной среды, т. е. быть герметичными и коррозионно-устойчивыми. Пределы измерения температуры и класс точности выбираются в зависимости от места установки на объекте управления. Для измерения температуры в туннельной печи используются термопреобразователи типа КТХАУ с унифицированным выходным сигналом 4-20mA, с пределами измерений 0-1100 0С и классами точности 0.5.
Для измерения разрежения будем использовать измерительный преобразователь разности давления Aplisens APR-2000G. Общее назначение: измерительный преобразователь давления предназначен для преобразования давления (-150 +150Па) неагрессивных и агрессивных газов, паров и пыли в токовый выходной сигнал (4¸20 mA). Прибор работает по пьезорезистивному принципу измерений.
Регулятор – это устройство, выполняющие функцию поддержания выходной величины регулируемого параметра на заданном уровне. При автоматизации производственных процессов чаще всего задача синтеза сводится к выбору наиболее подходящего типового регулятора с П, ПИ, ПИД – законами регулирования и определению его параметров настройки, обеспечивающих требуемый переходной процесс.
Синтез параметров настройки внутреннего регулятора (П – регулятор).
w1=tf([1],[0.001 1]);
w2=tf([0.82],[0.21 1]);
w3=tf([1],[0.01 1]);
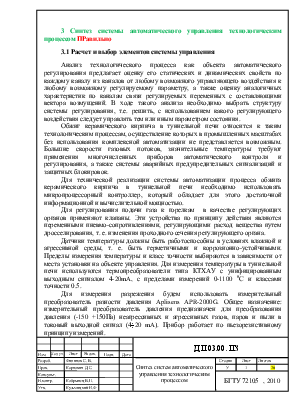
Расчет параметров настройки регулятора будем проводить используя пакет MATLAB. Запишем передаточную функцию и рассмотрим устойчивость по Найквисту.

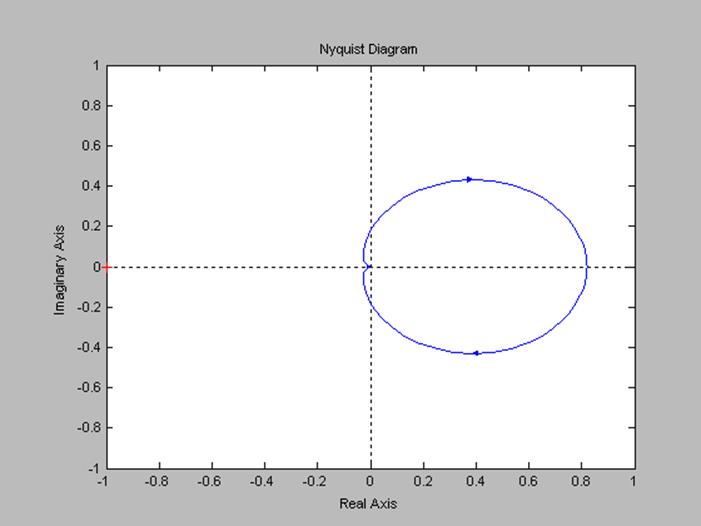
Рисунок 3. – АФЧХ исследуемого объекта
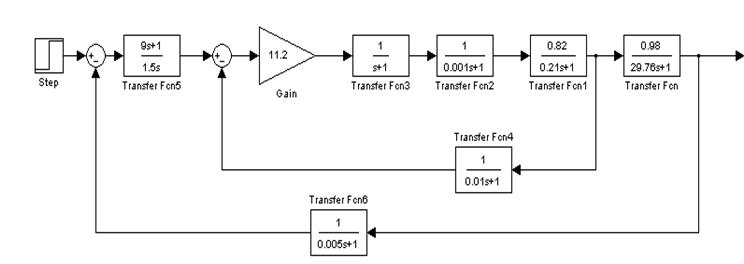
В связи с невозможностью реализации выбранного закона управления в силу крайне больших Кп, при выборе параметров настройки регулятора учтем ограничения, накладываемые на реализацию выбранного закона. С учетом ограничения на максимальный коэффициент усиления регулятора Кп выбираем равным Кп=11.2.
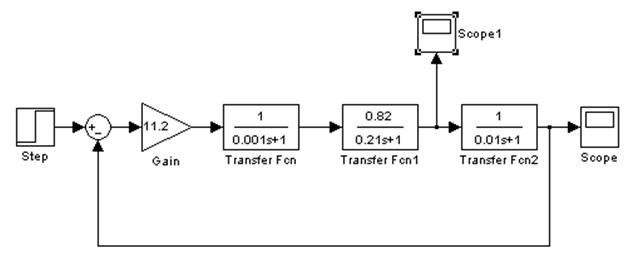
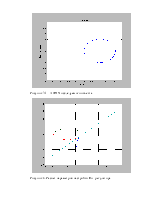
Рисунок 3. Структурная схема внутреннего контура регулирования
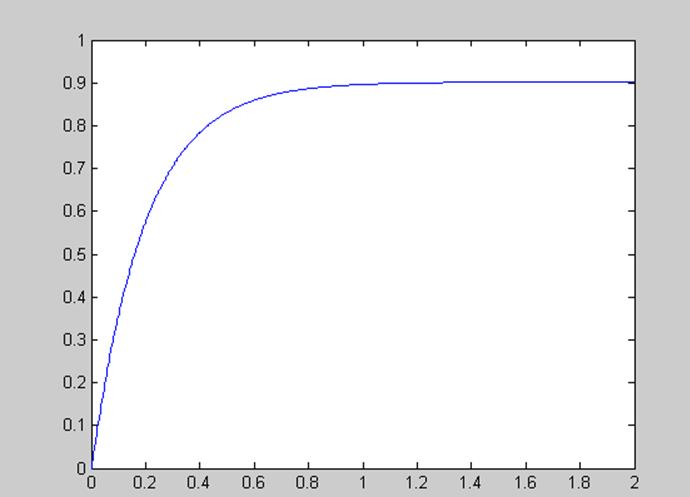
Рисунок 3.1 – Структурная схема и график переходного процесса внутреннего контура при подачи по каналу управления единичного скачкообразного воздействия
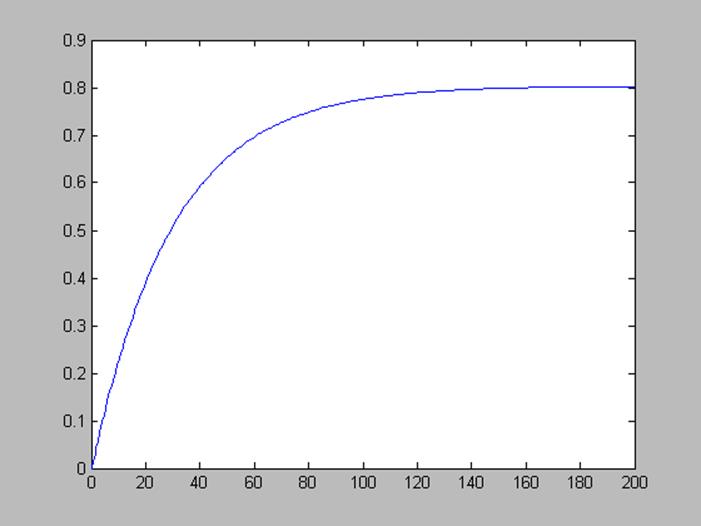
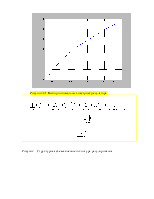
Рисунок 3. – Разгоночная характеристика по объекту управления по каналу расход газа – температура материала Fгаза – Тматериала.
Расчет регулятора будем производить из условия задания желаемого показателя колебательности М – значение ординаты амплитудной характеристики замкнутой системы при начальной ординате, равной единице.
 (3.1)
(3.1)
Сделав подстановку U=ReW(jw), V=IW(jw, ) получим уравнение окружности со смещенным центром и радиусом R.
(U + C)2 + V2 = R2 (3.2)
где С – расстояние от центра окружности до начала координат,
R – радиус окружности.
Причем
 (3.3)
(3.3)
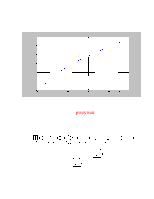
Синтез регулятора из условия обеспечения желаемого показателя колебательности, состоит в том чтобы подобрать настройки регулятора такие, чтобы АФЧХ системы коснулась окружности, как на рисунке 3.1
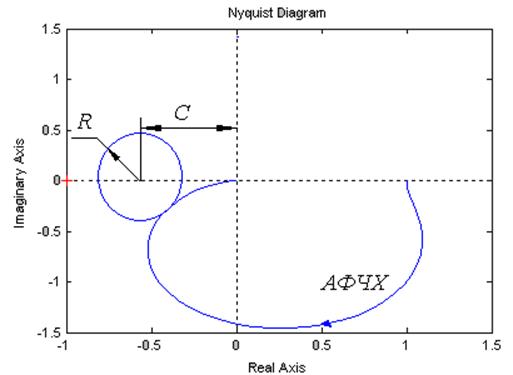
Рисунок 3.1 – Пример расчета регулятора из условия задания показателя колебательности
Синтез параметра настройки внешнего регулятора (ПИ-регулятор).
Расчет параметров настройки регулятора будем проводить используя пакет MATLAB. Запишем передаточную функцию и рассмотрим устойчивость по Найквисту.
w1=tf([0.09184 9.184],[0.0000021 0.00232 0.221 10.84]);
w2=tf([0.98],[29.76 1]);
w3=tf([1],[0.005 1]);
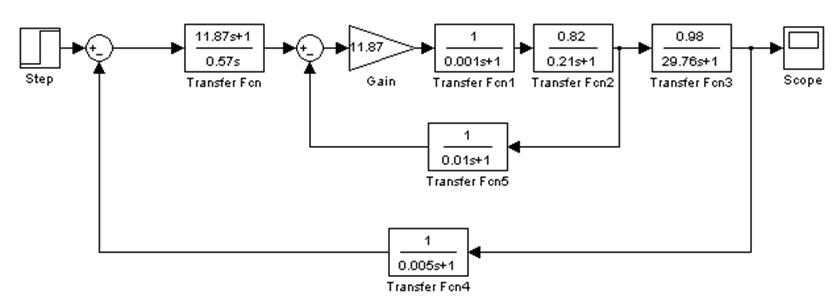
Рисунок 3. – Структурная схема внешнего контура регулирования

clear,clc,clf
% задаем передаточную функцию объекта
ww=tf([0.09 9],[0.00000031 0.0004 0.1 8.2 322.8 10.84])
figure(1);
nyquist (ww);
% задаем величину показателя качества
M=1.15;
w=0:0.01:2000;
x=-10:0.01:10;
p=j∙w;
kp=1;
Ti=8.9;
www=(kp+1./(Ti∙p)).∙(0.09∙p+9)./(0.0000003125∙p.^5+0.0004077∙p.^4+0.1019∙p.^3+8.193∙p.^2+322.9∙p.^1+10.84);
% создаем функции для перехода в комплексную область
Re=real(www);
Im=imag(www);
% объявляем радиус окружности
R=M/(1-M^2);
% С - расстояние от мнимой оси до центра окружности
C=M^2/(1-M^2);
%!Геометрия!х^2+y^2=R^2
y1=sqrt(R^2-(x-C).^2);
y2=-sqrt(R^2-(x-C).^2);
%к - тангенс угла наклона касательной к окружности
k=tan(asin(1/M));
% задаем уравнение прямой
y3=k∙(x);
figure(2);
plot(Re,Im,x,y1,x,y2,x,y3);
grid on
k=[0.1 1 2 3 4 6 8 10 11];
T=[20 8.9 5 3.3 2.4 1.5 0.95 0.7 0.6];
figure(3);
plot(1./T,k);
grid on
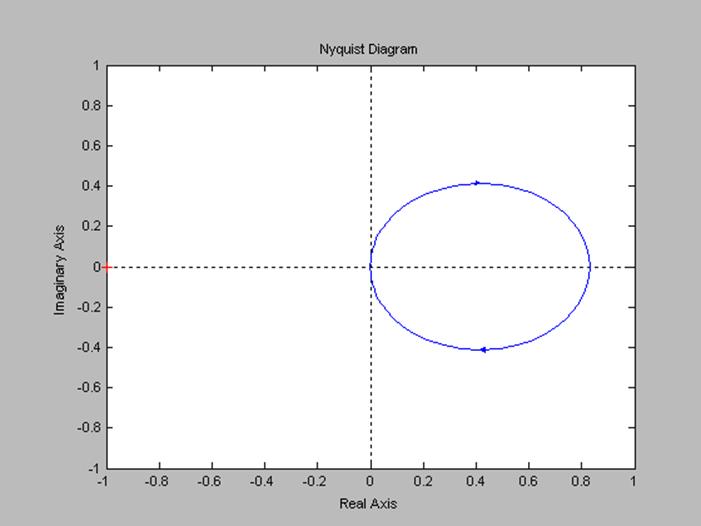
Рисунок 3.1 – АФЧХ исследуемого объекта
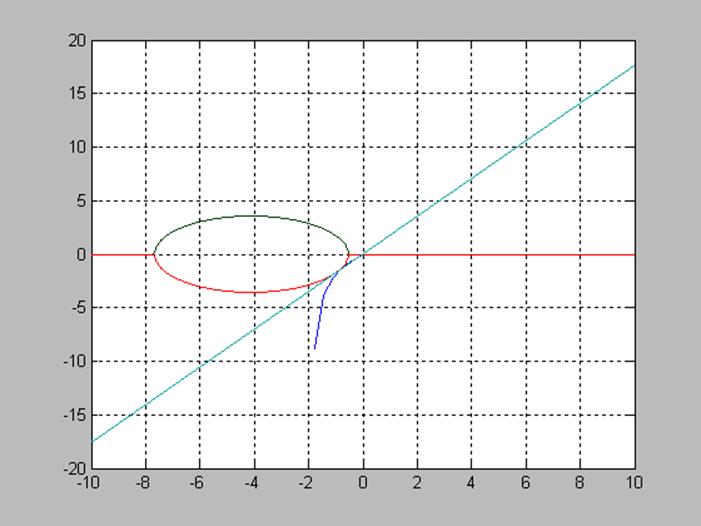
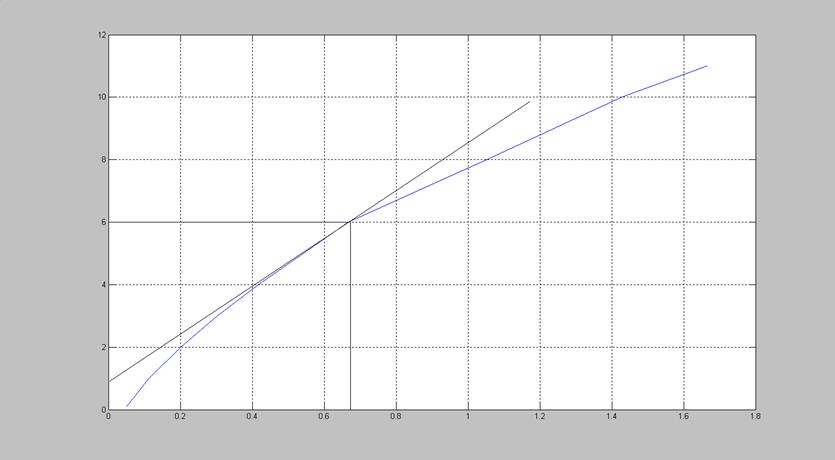
Рисунок 3. Расчет параметров настройки Пи- регулятора
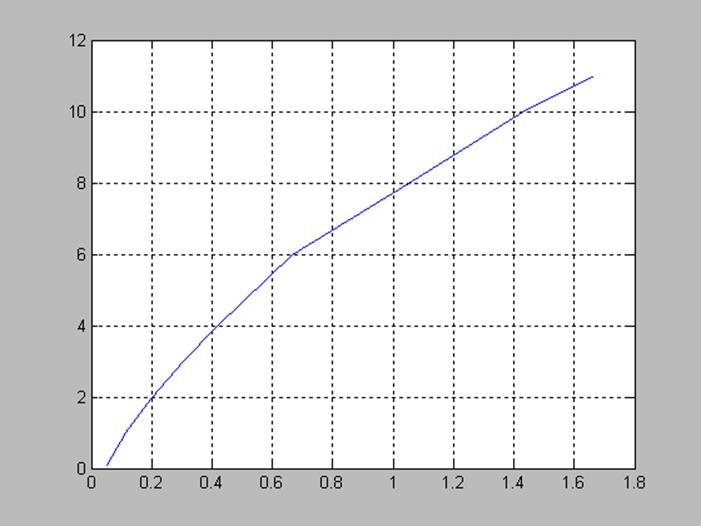
Рисунок 3.1 Выбор оптимальных настроек регулятора
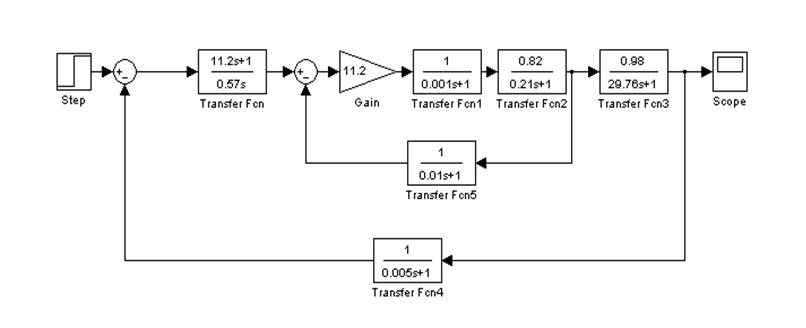
Рисунок – Структурная схема внешнего контура регулирования
рисунок
Передаточные функции объекта управления

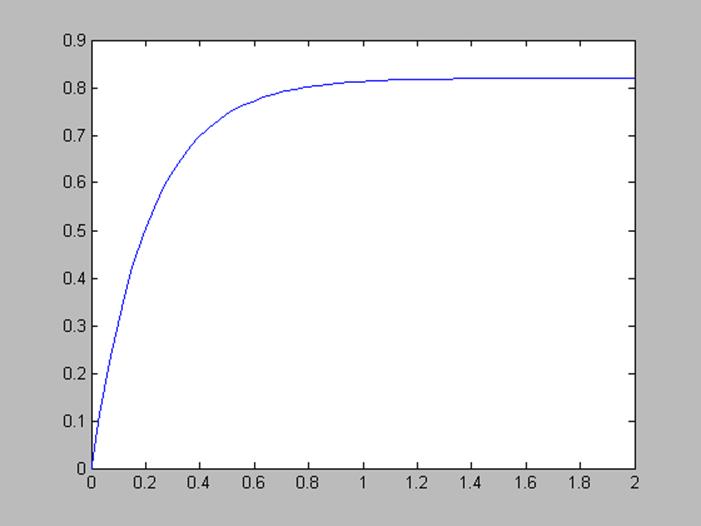
Рисунок 3. – Разгоночная характеристика объекта управления по каналам расход газа – температура газа Fгаза – Тгаза.
12.06.2010
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.