2.1. Анализ технологического процесса как объекта управления
Особенностью процессов протекающих в колонне К-102 является их большая сложность.
Эта сложность проявляется в значительном числе и многообразии параметров, определяющих течение процессов, в большом числе внутренних связей между параметрами, их взаимном влиянии друг на друга, причем изменение одного параметра вызывает нелинейные изменения других параметров. Отмеченная сложность в процессах, происходящих в атмосферной колонне, усиливается с наличием многих петель обратных связей между параметрами процесса, связанных со стриппинг-секциями и циркуляционными орошениями (ЦО). Поэтому необходимо учитывать внутренние связи по всем каналам, для качественного регулирования системы.
Для применения общих принципов теории управления к управлению технологическим процессом необходимо его представить как объект управления.
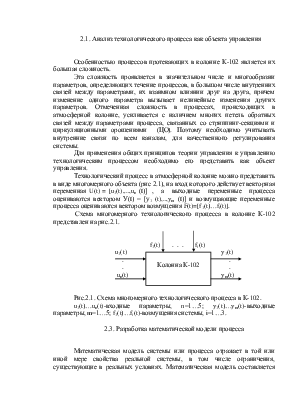
Технологический процесс в атмосферной колонне можно представить в виде многомерного объекта (рис 2.1), на вход которого действует векторная переменная U(t) = [u1(t),...,un (t)] , а выходные переменные процесса оцениваются вектором У(t) = [y1 (t),..,ym (t)] и возмущающие переменные процесса оцениваются вектором возмущения F(t)=[f1(t)…fi(t)].
Схема многомерного технологического процесса в колонне К-102 представлен на рис.2.1.
f1(t) . . . fi(t)
|
![]()
![]() . .
. .
. .
un(t) ym(t)
Рис.2.1. Схема многомерного технологического процесса в К-102.
u1(t)…un(t)-входные параметры, n=1…5; y1(t)…ym(t)-выходные параметры, m=1…5; f1(t)…fi(t)-возмущения системы, i=1…3.
2.3. Разработка математической модели процесса
Математическая модель системы или процесса отражает в той или иной мере свойства реальной системы, в том числе ограничения, существующие в реальных условиях. Математическая модель составляется (разрабатывается) в математических терминах (на математическом языке) и имеет, как правило, количественное описание.
Каждая исследуемая система имеет m входных величин и n выходных величин. Между входными и выходными величинами существуют внутренние динамические связи, вид которых определяется соответствующими динамическими характеристиками.
Обозначим
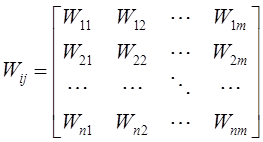
динамическую характеристику связи между i-м входом и j-м
выходом передаточной функцией Wij. Тогда
динамическая система будет иметь m![]() n характеристик. Они образуют
характеристическую матрицу, описывающую все динамические свойства системы:
n характеристик. Они образуют
характеристическую матрицу, описывающую все динамические свойства системы:
 (2.1)
(2.1)
 (2.36)
(2.36)
где yij(p)–преобразованное по Лапласу значение выходной (регулируемой) величины канала управления;
xij(p)–преобразованное по Лапласу значение входной (регулирующей, возмущающей) величины;
kij,![]() ij,
Tij,–соответственно коэффициент передачи, время
запаздывания и постоянная времени канала управления по i-ой
входной и j-ой выходной переменным.
ij,
Tij,–соответственно коэффициент передачи, время
запаздывания и постоянная времени канала управления по i-ой
входной и j-ой выходной переменным.
Согласно применяемому методу моментов зависимость (2.36) для любого канала может быть представлена в следующем виде:
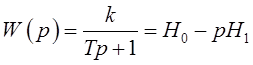 (2.37) где H0, H1–соответственно нулевой и первый моменты импульсной
характеристики.
(2.37) где H0, H1–соответственно нулевой и первый моменты импульсной
характеристики.
При этом момент H0 соответствует коэффициенту передачи для данного канала управления, т.е.:
![]() (2.38)
(2.38)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.