М = f1 (w) либо w = f2 (М), также М = f1 (n) или n = f2 (М). В зависимости от режима работы мамашины характеристики могут быть построены для двигательного или для тормозного режимов. Для двигательного режима частота вращения и момент считаются положительными. При тормозных режимах меняются знаки момента или частоты вращения и характеристики изображаются во 2-м или 4-м квадрантах (рис. 2.1).
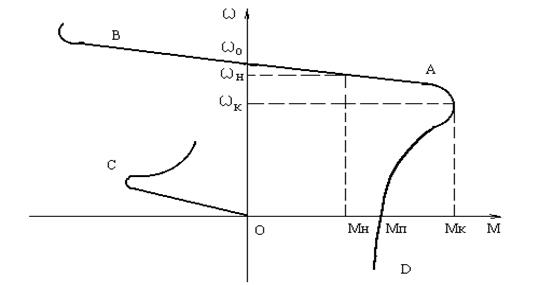
Рис. 2.1. Механические характеристики асинхронного электродвигателя:
А - в двигательном режиме;
В - при генераторном торможении;
С - при динамическом торможении;
D - при торможении противовключением
В двигательном режиме АД потребляет электрическую энергию из сети, преобразует ее в механическую энергию вращения ротора и в виде крутящего момента передает рабочей машине. Угловая скорость w (частота n) вращения ротора изменяется от 0 до угловой скорости магнитного поля статора wо (частоты nо). Эту частоту вращения называют синхронной. Крутящий момент изменяется от пускового МП до 0, скольжение S = wо - w / wо изменяется от 1 до 0. В паспорте АД указывается номинальная частота вращения ротора nн (число оборотов в минуту). Этой частоте вращения соответствует номинальный момент двигателя МН.
Пусковой момент превышает номинальный в mп раз Наибольший момент МК, развиваемый двигателем, соответствующая угловая скорость wк (частота вращения nк) и скольжение SК называются критическими. Критический момент превышает номинальный в mк раз. Точкой с критическим скольжением механическая характеристика разделяется на пусковую и рабочую ветви. У некоторых двигателей при скольжении S = 0,75 - 0,8 на пусковой ветви характеристика имеет минимальное значение.
На рабочей ветви характеристика близка к прямой линии. На графиках механическая характеристика в двигательном режиме изображается в 1-м или 3-м квадрантах. Наряду с двигательным применяются следующие тормозные режимы АД (рис. 2.1).
1. Генераторное торможение обеспечивается, когда частота вращения ротора n, сохраняя направление двигательного режима, превышает частоту вращения магнитного поля в обмотках статора nо. В этом случае АД преобразует механическую энергию вращения в электрическую, отдавая активную энергию в сеть и забирая из сети реактивную энергию для создания магнитного поля в обмотках статора. Момент на валу отрицательный (с направлением, обратным при двигательном режиме), скольжение - отрицательное, так как w>wо.
Внешне характеристика АД в генераторном тормозном режиме напоминает опрокинутую двигательную. В этом режиме момент АД также имеет свой максимум, однако он по абсолютной величине больше, чем в двигательном режиме.
2 Торможение противовключением происходит: а) при реверсировании на ходу, когда направление вращения магнитного поля меняется на противоположное, а ротор за счет инерции своих маховых масс и масс нагрузочной машины продолжает вращаться в прежнем направлении; б) когда момент сопротивления МС рабочей машины превышает пусковой момент МП электродвигателя и оказывает активное воздействие на него, заставляя вращаться ротор в противоположном по отношению к магнитному полю направлении. В обоих случаях момент на валу и частота вращения ротора имеют разные знаки, скольжение превышает единицу.
3. Динамическое торможение осуществляется отключением АД от сети переменного тока и подачей в обмотку статора постоянного тока. За счет внешнего момента ротор двигателя вращается в постоянном магнитном поле статора. В стержнях (обмотке) ротора наводится ЭДС переменного тока, происходит взаимодействие магнитных полей статора и ротора; ротор затормаживается. Момент на валу отрицательный, частота вращения ротора положительная.
При постоянно или медленно меняющейся нагрузке между моментом электродвигателя МД, моментом сопротивления рабочей машины МС имеет место статическое равновесие:
МД = МС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.