АВТОМАТИЧЕСКИЙ ДОЗАТОР 6.041 АД-50-НК
Весовой автоматический дозатор 6.041 АД-50-НК предназначен для автоматического дозирования муки с объемной массой 0,25 – 0,7 т/м3.
Дозатор состоит из шнекового и барабанного питателей, регулятора плавности с датчиками, кожуха, станины, грузоприемного устройства и электрооборудования. Станина представляет собой неразъемную сварную конструкцию, на которой установлена подставка.
Коромысло 3 (рис. 192) опирается на самоустанавливающиеся подушки опорных стоек, закрепленных на станине. К правому плечу коромысла на серьгах подвешено грузоприемное устройство 51 с открывающимся дном 50, которое удерживается в закрытом положении при помощи штанги 49, колена затвора б, рычагов 45 и 46.
Для ограничения поворота рычага 46 против часовой стрелки служит упор 48. Открывание дна грузоприемного устройства осуществляется тягой 44, свободно подвешенной на рычаге 39, связанном через тягу с электромагнитом 34. Закрывание дна происходит под действием противовеса. Датчик 47 служит для блокировки закрытого положения дна. На левом плече коромысла подвешен гиредержатель 7 с гирями и регулятор точности со шкалой 22 и передвижной гирей 23. Положение равновесия определяют с помощью неподвижного 21 и подвижного указателей, установленных на шкале 22 коромысла.
Для тарирования весовой системы дозатора служат полость в гиредержателе 7 и тарная гиря 2 с контргайкой 1, ограничение поворота коромысла обеспечивают упоры 8 и 9. Отработка грубой (предварительной) и точной массы осуществляется с помощью регулятора плавности с датчиками. Плоская пружина 11 воздействует через регулируемый упор 10 на рычаг 15. Ограничение хода рычага 15 обеспечивается регулируемым упором 13.
Для отработки грубой (предварительной) массы служит датчик
14, который срабатывает при вхождении в его паз флажка рычага
15. Отработка точной массы обеспечивается датчиком 18, который срабатывает при вхождении в его паз флажка рычага 17. Возврат рычага 17 в исходное положение до упора 19 осуществляется от пружины 20.
На подставке станины установлен барабанный питатель 30 с приводом от электродвигателя 25 через червячный редуктор 29. На барабанном питателе установлено питающее устройство 31, включающее шнековый питатель 28 с приводом от электродвигателя 26 через червячный редуктор 27. Шнек, установленный над барабанным питателем, соединяется с ним переходным патрубком, который внутри разделен на секцию основной подачи и секцию досыпки
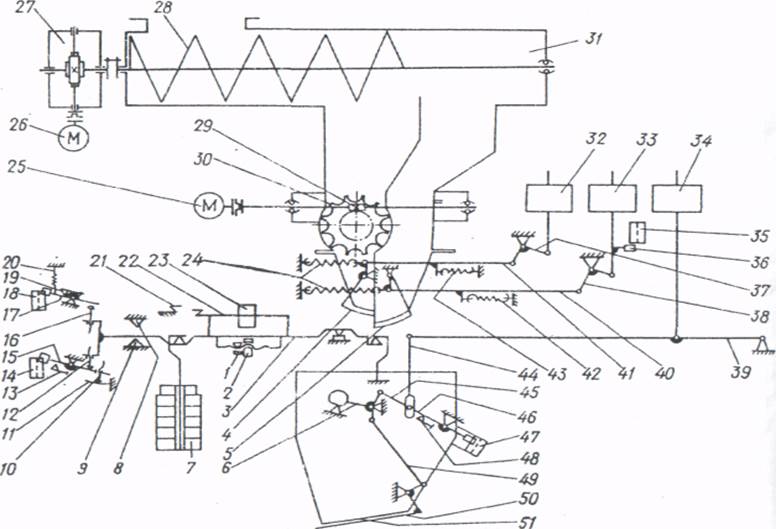
Рис. 192. Кинематическая схема дозатора 6.041 АД-50-НК:
1 – контргайка; 2 – тарная гирл; 3 – коромысло; 4,5 – заслонки; 6 – колено затвора; 7 – гиредержатель; 8, 9, 10, 12, 13, 16, 19, 48 – упоры; 11 – плоская пружина; 14, 18, 35, 47 – датчики; 15, 17, 37, 38, 39, 45, 46 – рычаги; 20, 24, 42, 43 – пружины; 21 – неподвижный указатель; 22 – шкала; 23 – передвижная гиря; 25, 26 – электродвигатели; 27, 29 – червячные редукторы; 28, 30 – шнековый и барабанный питатели; 31 – питающее устройство; 32, 33, 34 – электромагниты; 36 – флажок; 40, 41, 44 – тяги; 49 – штанга; 50 – дно; 51 – грузоприемное устройство.
Отсечка потока продукта осуществляется секторными заслонками 4 и 5. Заслонка 4 служит для перекрытия потока продукта после остановки барабанного питателя, а заслонка 5 – для перекрытия потока продукта после остановки шнекового питателя. Открытие заслонки 5 осуществляется через тягу 40 с пружиной 42 и рычаг 38, связанный через тягу с электромагнитом 33. Открытие заслонки 4 осуществляется через тягу 41с пружиной 43 и рычаг 37, связанный через тягу с электромагнитом 32. Для блокировки открытого положения заслонки 5 и включения шнекового питателя 28 служит датчик 35 с флажком 36. Пружины 24 служат для четкого закрытия заслонок 4 и 5.
Работа дозатора в автоматическом режиме происходит следующим образом. В исходном положении заслонки 4 и 5 закрыты, питатели выключены, дно 50 грузоприемного устройства 51 закрыто, флажок рычага 46 находится в зоне срабатывания датчика 47, коромысло 3 под действием массы гиредержателя 7 с гирями находится в крайнем нижнем положении, флажок, рычага 15 под действием упора 12 коромысла выведен из зоны срабатывания датчика 14, флажок рычага 17 выведен из зоны срабатывания датчика 18 под действием пружины 20, флажок 36 тяги .электромагнита 33 выведен из зоны срабатывания датчика 35. Электродвигатели выключены.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.