НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ
АГРАРНЫЙ УНИВЕРСИТЕТ
Инженерный институт
КАФЕДРА ЭЛЕКТРИФИКАЦИИ И АВТОМАТИЗАЦИИ СЕЛЬСКОГО ХОЗЯЙСТВА
КОНТРОЛЬНАЯ РАБОТА
По автоматике
Выполнил: Шалабаев А.А
Группа 342
№ зачётной книжки – 312 – 04
Проверил: Добролюбов И.П.
Новосибирск
- 2008
САУ переключением передач трактора (рисунок 1)
Для информации о нагрузке двигателя обычно используются косвенные параметры — положение педали акселератора, давление во впускном трубопроводе и пр. Первый из них для трактора неприемлем из-за особенностей работы двигателя со всережимным регулятором. Основными недостатками гидромеханических систем управления являются нестабильность характеристик датчиков и ограниченные возможности выполнения требований, предъявляемых к САУ переключением передач тракторных агрегатов. Поэтому в последнее время заметно повысился интерес к электронным системам управления.
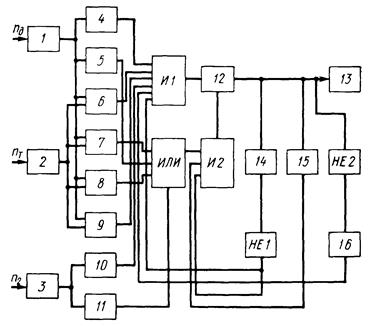 Рисунок 1. Структурная схема САУ
переключением передач
Рисунок 1. Структурная схема САУ
переключением передач
В качестве информативных параметров приняты скорости вращения вала двигателя пд и выходного вала трансмиссии п2, а также передаточное отношение гидротрансформатора iтн=wт/wн=пт/пд, характеризующее скольжение в нем. Сигналы датчиков скорости 1—3 соответственно насосного и турбинного колес гидротрансформатора и выходного вала трансмиссии после усилителей .и выпрямителей поступают на блоки-определители частоты вращения 4, 5, 10, 11 и передаточного отношения iтн 6—9. Сигналы на выходах этих блоков появляются при условии, что действительные значения частоты вращения соответствующих валов и iтн отклоняются от заданных пределов. Выходной сигнал логической схемы И1 формируется при одновременном наличии сигналов от блоков 4 и 10, которые появляются, если пд>1200мин-1 и п2>1200мин-1; от блоков 6 и 9, возникающих при 0,85<iтн <1,1; от указателя 16 включенной передачи; от логической схемы НЕ1, которая выдает сигнал, если команда отсутствует длительное время. С выхода схемы И1 сигнал поступает в блок памяти 12, после чего подается команда на включение высшей передачи (включение соленоида 13). Выходной сигнал логической схемы ИЛИ формируется при появлении одного из следующих сигналов: от блоков 5 и 11, возникающих при пд<600мин-1 и п2<600мин-1, или от блоков 7 и 8 — при iтн<0,6 и iтн>1,2. Сигнал на включение низшей передачи формируется с помощью логической схемы И2, на вход которой, кроме сигнала от схемы ИЛИ, должны поступать еще сигналы от указателя 15 включенной высшей передачи и от логической схемы HE1. В блоке 12 стирается сигнал включения соленоида высшей передачи. Посредством логической схемы НЕ2 и указателя 16 при переключении на низшую передачу и выключении при этом соленоида подается сигнал разрешения на схему И1 для возможности переключения на высшую передачу. С момента переключения передачи до окончания переходных процессов в трансмиссии состояние машины быстро изменяется, что может вызвать в системе противоположный сигнал. Для исключения этого предусмотрена линия задержки исполнения команд во времени, содержащая блок 14 с дифференциальным, выпрямляющим элементами и мультивибратором и логическую схему НЕ1. Дополняя САУ различными устройствами, можно обеспечить выполнение любых требований к САУ и использовать ее для трансмиссии любой сложности.
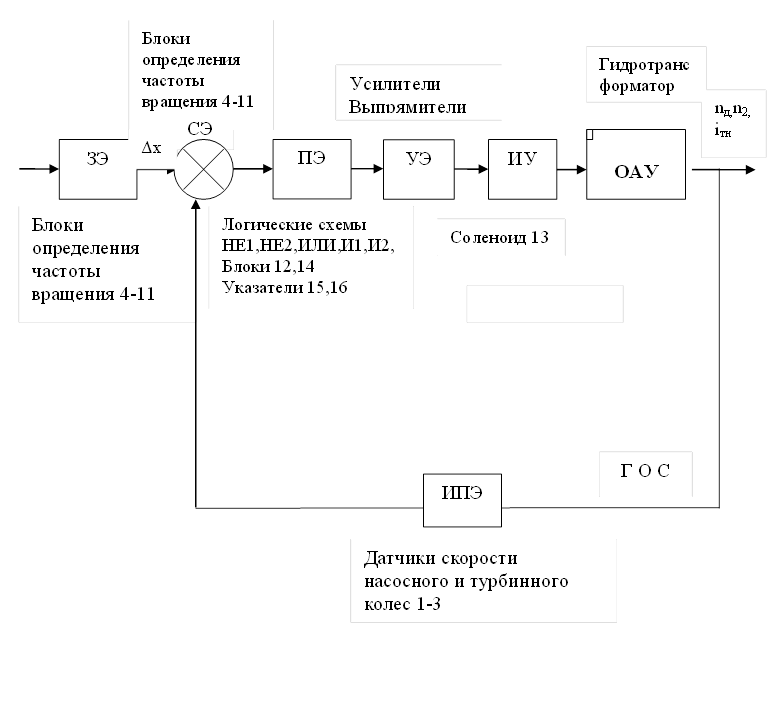
Рисунок 2 – Обобщенная функциональная схема САУ
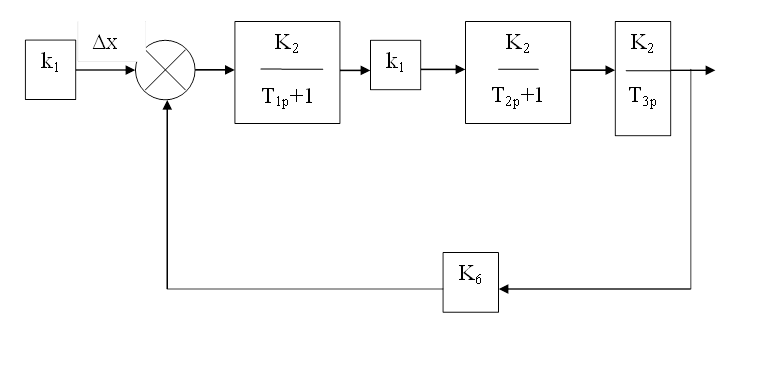
Рисунок 3 – Структурная алгоритмическая схема САУ переключением передач.
Передаточная функция САУ имеет вид:

Где ΔХ(p)=k1,![]() характеристическое уравнение
характеристическое уравнение ![]() .
.
Функциональная схема, построенная на рисунке 2.
Таким образом, данная система является замкнутой одномерной одноконтурной адаптивной статической системой автоматического управления косвенного действия с гидравлической элементной базой, с аналоговым способом передачи сигналов, с принципом управления по возмещению, с непрерывным управлением во времени.
Для построения структурной алгоритмической схемы воспользуемся таблицей. Схема представлена на рисунке 3.
Литература
1. Бородин И.Ф., Недилько Н.М. Автоматизация технологических процессов.- М.: Агропромиздат, 1986.
2. Бородин И.Ф., Кирилин Н.И. Основы автоматизации производственных процессов. - М.: Колос.1977.
3. Автоматика и автоматизация производственных процессов: Учеб. пособие/Под ред. И.И., МАртыненко.-М.:Агропромиздат,1986.
4. Бородин И.Ф. Технические средства автоматики и телемеханики. М.: Агропромиздат,1992.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.