|
|
|
|
|
|
|

на тему: «Проектирование привода реверсивного ленточного конвейера».
Автор проекта ИЖБОЛДИН Р.Ю.
Специальность (направление) 1202
Группа КМ-11
Руководитель проекта Чешев В.Ф.
Проект защищен Оценка
Студент ИЖБОЛДИН Р.Ю. группа КМ-11 факультетМТ
|
Исходные данные |
Размерность |
Вариант №7 |
Тяговое усилие ленты, F |
Н |
5000 |
|
Скорость движения конвейерной ленты, V |
с-1 |
0.2 |
|
Срок службы , L |
лет |
3,5 |
|
Диаметр приводного барабана конвейера, d |
м |
0,3 |
|
Коэффициент годового использования, Кг |
– |
0,3 |
|
Коэффициент суточного использования, Кс |
– |
0,6 |
1. Конвейер работает в помещении (tокр = 20°С).
2. Приводной барабан конвейера расположен горизонтально.
![]() График загрузки конвейера:
График загрузки конвейера:
![]()
![]()
|
![]()
![]()
![]()
![]() 0,3Т
0,3Т
![]()
![]() 0,1ТТ- номинальный
крутящий момент;
0,1ТТ- номинальный
крутящий момент;
![]()
![]()
![]()
![]() Тп- пусковой момент;
Тп- пусковой момент;
![]()
![]()
![]()
![]()
![]()
![]() 10-3t 0.8t 0.1t 0.1t t t- время
эксплуатации конвейера.
10-3t 0.8t 0.1t 0.1t t t- время
эксплуатации конвейера.
![]() t
t
Привод должен содержать:
1. Электродвигатель.
2. Двухступенчатый зубчатый редуктор.
3. Открытую передачу.
4. Муфты.
5. Раму.
Введение
Реверсивные ленточные конвейеры являются распространенным средством непрерывной передачи различных насыпных и штучных грузов в промышленности, строительстве, сельском хозяйстве и других областях народного хозяйства.
Основой конвейера является бесконечная вертикальная или горизонтальная замкнутая гибкая лента (1). В зависимости от типа роликоопор (2) лента может иметь плоскую или желобчатую форму. Верхняя рабочая и нижняя холостая ветви ленты поддерживаются роликоопорами. Приводной барабан (3), приводимый во вращение электродвигателем через редуктор, сообщает поступательное движение ленте конвейера. Постоянное натяжение ленты обеспечивается натяжным устройством. Груз поступает на ленту через загрузочное устройство, а разгружается через воронку барабана, либо в любом пункте вдоль конвейера посредством специальных разгрузочных устройств.
Ленточные конвейеры делятся на: легкие, нормальные, тяжелые, сверхтяжелые.
1. Разработка кинематических схем
1.1
Нахождение частоты
вращения исполнительного органа nр.о. 
1.2 Разработка первой кинематической схемы привода
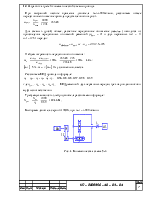
При выбранной частоте вращения двигателя nдв1=1000 об/мин, рассчитаем общее передаточное отношение привода представленного на рис.2
Для схемы 1 (рис.2) общее, расчетное передаточное отношение (uобщ1расч.) находится из произведения передаточных отношений ременной (uрем. = 2), червячной (uч. = 12,5) и цилиндрической прямозубой (uц.п. = 3,15) передач:
uобщ1расч = uрем.× uч.× uц.п. = 2∙12.5∙3.15 = 78.75
Найдем погрешность передаточного отношения:
 ;
;
![]() ,
, ![]() условие выполняется.
условие выполняется.
Рассчитаем КПД привода по формуле:
![]()
где ![]() - КПД ременной, червячной,
цилиндрической прямозубой передач, трех пар подшипников, муфты соответственно.
- КПД ременной, червячной,
цилиндрической прямозубой передач, трех пар подшипников, муфты соответственно.
Требуемую мощность электродвигателя рассчитаем по формуле:
 ,
,
Рис. 2. Кинематическая схема №1
Выбираем двигатель серии 4А закрытого обдуваемого исполнения 90Л6 имеющего при nдв1 = 1000 об/мин следующие данные: Nдв =1,5кВт;
1.3 Разработка второй кинематической схемы привода
При выбранной частоте вращения двигателя nдв2=1500 об/мин, рассчитаем общее передаточное отношение привода представленного на рис.3
Для схемы 2 (рис.3) общее, расчетное передаточное отношение (uобщ2расч.) находится из произведения передаточных отношений ременной (uрем. = 4), червячной (uч. = 10) и конической (uк. = 2,8) передач:
uобщ2расч = uрем.× uч.× uк. = 4∙10∙2,8=112
Найдем погрешность передаточного отношения:
 ;
;
![]() ,
, ![]() условие выполняется.
условие выполняется.
Рассчитаем КПД привода по формуле:
![]()
где ![]() - КПД ременной, червячной, конической передачи, трех пар
подшипников и муфты соответственно.
- КПД ременной, червячной, конической передачи, трех пар
подшипников и муфты соответственно.
Требуемую мощность электродвигателя рассчитаем по формуле:
Выбираем двигатель серии 4А90Л6, при nдв2 = 1500 об/мин.
Рис.3. Кинематическая схема №2
1.4 Разработка третей кинематической схемы привода
При выбранной частоте вращения двигателя nдв3=3000об/мин, рассчитаем общее передаточное отношение привода представленного на рис.4
Для схемы 3 (рис.4) общее, расчетное передаточное отношение (uобщ3расч.) находится из произведения передаточных отношений ременной (uрем. = 2) и двух червячных (uч1. = 9, uч2 = 12,5) передач:
uобщ3расч = uрем.× uч1..× uч2.. =2∙9∙12,5=225
Найдем погрешность передаточного отношения:
 ;
;
![]() ,
, ![]() условие выполняется.
условие выполняется.
Рассчитаем КПД привода по формуле:
![]()
где ![]() - КПД ременной, двух червячных передач,
трех пар подшипников и муфты соответственно.
- КПД ременной, двух червячных передач,
трех пар подшипников и муфты соответственно.
Требуемую мощность электродвигателя рассчитаем по формуле:
Выбираем двигатель серии 4А90Л6, при nдв3 = 3000 об/мин.
Рис.4. Кинематическая схема №3
2. Выбор кинематической схемы
Из выше перечисленных схем выбираем кинематическую схему 1 (Рис.2).
В этой схеме используется электродвигатель со скоростью вращения n = 1000 об/мин, который имеет относительно малые габаритные размеры.
КПД данной схемы наибольший и составляет 71%.
При расчете частот вращения ошибка не превышает 5%
Ременная передача обеспечивает бесшумность работы, и само предохранение от перегрузок: проскальзывание ремня.
Червячная передача дает возможность использования больших передаточных чисел. Обеспечивает плавность и бесшумность работы, повышенную кинематическую точность, возможность самоторможения, что позволяет не применять дополнительных устройств торможения.
Существуют также недостатки при применении этих передач, но перечисленные положительные качества перевешивают их.
3. Кинематический расчет
Рассчитаем вращающий момент на валу электродвигателя выбранной кинематической схемы 2 (рис.3):
 ;
;
где Рдв = 1408.5 Вт – требуемая мощность двигателя;
 –
угловая скорость вращения двигателя
–
угловая скорость вращения двигателя
(nдв – частота вращения двигателя).
Вращающие моменты на валах редуктора:
Частоты вращения и угловые скорости на валах:
Находим ошибку по скорости на четвертом выходном валу:

![]() ,
, ![]() условие выполняется.
условие выполняется.
4. Расчет цилиндрической передачи редуктора
4.1 Выбор материала для зубчатых колес.
Выбираем материал колес:
Желая получить сравнительно небольшие габариты и невысокую стоимость редуктора, выбираем для изготовления колес сравнительно недорогую сталь
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.