Лекция №20
Тема 21: Волновые зубчатые передачи
21.1. Принцип работы
 Волновая
передача – механизм, в котором движение между звеньями передаётся перемещением
волны деформации одного из звеньев. Передачу можно рассматривать как
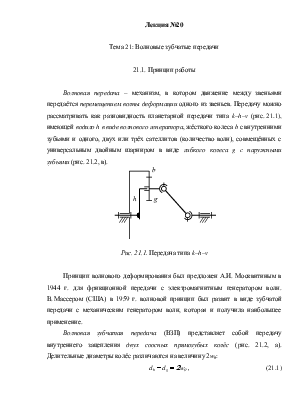
разновидность планетарной передачи типа k–h–v (рис. 21.1), имеющей водило h в виде волнового генератора,
жёсткого колеса b с внутренними зубьями и одного, двух или трёх
сателлитов (количество волн), совмещённых с универсальным двойным шарниром в
виде гибкого колеса gc
наружными зубьями (рис. 21.2,
в).
Волновая
передача – механизм, в котором движение между звеньями передаётся перемещением
волны деформации одного из звеньев. Передачу можно рассматривать как
разновидность планетарной передачи типа k–h–v (рис. 21.1), имеющей водило h в виде волнового генератора,
жёсткого колеса b с внутренними зубьями и одного, двух или трёх
сателлитов (количество волн), совмещённых с универсальным двойным шарниром в
виде гибкого колеса gc
наружными зубьями (рис. 21.2,
в).
Рис. 21.1. Передача типа k–h–v
Принцип волнового деформирования был предложен А.И. Москвитиным в 1944 г. для фрикционной передачи с электромагнитным генератором волн. В. Массером (США) в 1959 г. волновой принцип был развит в виде зубчатой передачи с механическим генератором волн, которая и получила наибольшее применение.
Волновая зубчатая передача (ВЗП) представляет собой передачу внутреннего зацепления двух соосных прямозубых колёс (рис. 21.2, а). Делительные диаметры колёс различаются на величину 2w0:
![]() (21.1)
(21.1)
где w0 – размер деформирования.
 |
Рис. 21.2. Волновая передача с неподвижным жёстким колесом
При малой разнице чисел зубьев сборка жёстких колес невозможна вследствие интерференции зубьев. Поэтому колесо g делают гибким. При сборке передачи генератор волн h вставляют в отверстие гибкого колеса, деформируя его так, чтобы в точках А и Д (рис. 21.2, б) зубья зацеплялись на полную высоту, а в точках В и Е между вершинами образовывался радиальный зазор. В результате такой сборки образуется две волны. Кроме двухволновых встречаются также одно- и трёхволновые генераторы волн.
 При
вращении генератора волн h радиальные перемещения w точек
гибкого колеса, вызванных его деформированием, непрерывно изменяются в пределах
от –w0
до w0
(рис. 21.3). На полном обороте волнового генератора укладывается две волны.
Таким образом, волна перемещений бежит по окружности гибкого колеса.
Поэтому передачу назвали волновой.
При
вращении генератора волн h радиальные перемещения w точек
гибкого колеса, вызванных его деформированием, непрерывно изменяются в пределах
от –w0
до w0
(рис. 21.3). На полном обороте волнового генератора укладывается две волны.
Таким образом, волна перемещений бежит по окружности гибкого колеса.
Поэтому передачу назвали волновой.
Рис. 21.3. Перемещения точек гибкого колеса
Принцип работы передачи с неподвижным жёстким колесом b рассмотрен на рис. 21.4. В одном из вариантов волновой генератор h выполняют конструктивно в виде кулачка, на который надевается специальный подшипник с тонкими кольцами. В точках А и Д осуществляется беззазорное зацепление на полную глубину захода зубьев. В точках В и Е между вершинами зубьев имеется гарантированный зазор, и зубья свободно перемещаются друг относительно друга без зацепления. В точках Б и Г зубья входят на половину максимальной глубины захода.
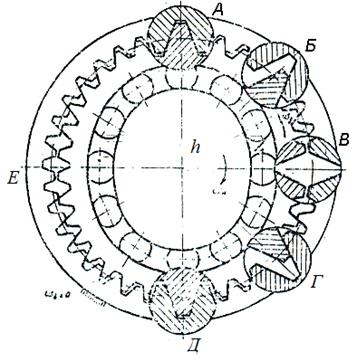
Рис. 21.4. Стадии зацепления
При вращении волнового генератора h по часовой стрелке с угловой скоростью ![]() происходят
следующие стадии зацепления:
происходят
следующие стадии зацепления:
– при повороте волнового генератора на угол 45° зона максимального захода переместится в точку Б, а в точке А зубья наполовину выйдут из зацепления;
– поворот ещё на 45° переместит зону полного зацепления в точку В, а в точках А и Д будет полный зазор;
– поворот волнового генератора еще на 90° приведет к картине, изображенной на рис. 21.4, при этом гибкое колесо переместится на один зуб.
Зубья гибкого колеса испытывают
реактивное давление зубьев неподвижного жёсткого колеса и перемещаются против
направления ![]() . За один оборот волнового
генератора гибкое колесо переместится на число зубьев, равное числу волн (в
данной схеме на 2 зуба).
. За один оборот волнового
генератора гибкое колесо переместится на число зубьев, равное числу волн (в
данной схеме на 2 зуба).
В процессе работы зубья гибкого колеса перемещаются к центру и выходят из зацепления, чтобы в дальнейшем снова войти в зацепление, образуя волну радиального перемещения w (рис. 21.3).
Из рассмотренного принципа работы передачи следует, что зубья, на которые набегает генератор волн, входят в зацепление. Именно они передают рабочую нагрузку. Теоретически дуга зацепления распространяется от точек А до В и от Д до Е. Это означает, что число зубьев в одновременном зацеплении составляет 50%. Практически с учётом неточностей изготовления и сборки рабочее число зубьев составляет 20…40%. Это одно из основных преимуществ волновых зубчатых передач.
NB 21.1. Многопарность зацеплений волновой передачи обеспечивает высокую нагрузочную способность при малых габаритах.
21.2. Кинематика передачи
При закреплении жёсткого колеса bвращение
волнового генератора с угловой скоростью ![]() вызывает
вращение гибкого колеса с угловой скоростью
вызывает
вращение гибкого колеса с угловой скоростью ![]() .
Передаточное отношение находят по аналогии с планетарной передачей с использованием
метода обращения движения (метода Виллиса). При сообщении всем звеньям
механизма дополнительной скорости –
.
Передаточное отношение находят по аналогии с планетарной передачей с использованием
метода обращения движения (метода Виллиса). При сообщении всем звеньям
механизма дополнительной скорости –![]() волновой
генератор остановится, а колёса b и g будут вращаться. Передаточное отношение в обращённом механизме при
остановленном генераторе волн (рис. 21.2, в):
волновой
генератор остановится, а колёса b и g будут вращаться. Передаточное отношение в обращённом механизме при
остановленном генераторе волн (рис. 21.2, в):
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.