Тема 4. Использование методов имитационного моделирования при проектировании организационно-технологической структуры ГПС
4.1. Классификация методов имитационного моделирования
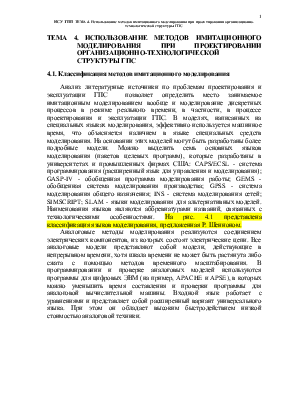
Анализ литературные источники по проблемам проектирования и эксплуатации ГПС позволяет определить место занимаемое имитационным моделированием вообще и моделирование дискретных процессов в режиме реального времени, в частности, в процессе проектирования и эксплуатации ГПС. В моделях, написанных на специальных языках моделирования, эффективно используется машинное время, что объясняется наличием в языке специальных средств моделирования. На основании этих моделей могут быть разработаны более подробные модели. Можно выделить семь основных языков моделирования (пакетов целевых программ), которые разработаны в университетах и промышленных фирмах США: CAPS/ECSL - система программирования (расширенный язык для управления и моделирования); GASP-IV - обобщенная программа моделирования работы; GEMS - обобщенная система моделирования производства; GPSS - система моделирования общего назначения; INS - система моделирования сетей; SIMSCRIPT; SLAM - языки моделирования для альтернативных моделей. Наименования языков являются аббревиатурами названий, связанных с технологическими особенностями. На рис. 4.1 представлена классификация языков моделирования, предложенная Р. Шенноном.
Аналоговые методы моделирования реализуются соединением электрических компонентов, из которых состоят электрические цепи. Все аналоговые модели представляют собой модели, действующие в непрерывном времени, хотя шкала времени не может быть растянута либо сжата с помощью методов временного масштабирования. В программировании и проверке аналоговых моделей используются программы для цифровых ЭВМ (на пример, APACHE и APSE), в которых можно уменьшить время составления и проверки программы для аналоговой вычислительной машины. Входной язык работает с уравнениями и представляет собой расширенный вариант универсального языка. При этом он обладает высоким быстродействием низкой стоимостью аналоговой техники.
|
Гибридное имитационное моделирование объединяет гибридные системы со взаимодействием аналоговой и цифровой аппаратных частей , а так же так называемые методы гибридизации, где гибридное моделирование участвует лишь на стадии построения алгоритма модели.
Промежуточное положение между аналоговыми и цифровыми методами занимает имитационное моделирование, в котором используется используются и непрерывные, и дискретные события. Современные гибридные методы вычислений основано на аналогово-цифровых и цифро-аналоговых преобразователях. К недостаткам этих методов относятся сложность создания системы имитационного модели и низкая точность результатов, получаемых в результате моделирования.
Цифровые имитационные методы в своей основе используют универсальные и специальные языки. Универсальные языки обладают большой гибкость разработки, отладки и использования модели. Однако при этом увеличиваются затраты времени на программирование, так как порядок выполнения операций, отсчет системного времени и контроль процесса моделирования существенно усложняются.
Специализированные языки цифрового имитационного моделирования делятся на две группы, соответствующие двум видам имитации, которые развиваются независимо. Имитация непрерывных процессов находится на границе гибридных методов, где гибридизация участвует на стадии построения алгоритма модели. Они, в свою очередь, делятся на три типа: языки аналогового моделирования; языки применяемые для решения систем дифференциальных уравнений, описывающих детерминированные замкнутые непрерывные системы; языки уравнений. Языки MIDAS, PACTOLUS, SCADS, MADBLOC, COBLOC и 1130 CSMP используют гибридную покомпонентную эмуляцию поведения аналоговых и гибридных ЭВМ. Их взаимодействие обеспечивается с помощью блочно-ориентированного языка, в них так же эмулируется структура и элементы аналоговой и гибридной ЭВМ.
Язык Динамо (Динамические модели), разработанный в Массачусетском технологическом институте, используется для моделирования переменных, непрерывных по диапазону своих значений, но дискретных по времени. Переменные на языке Динамо описываются с помощью уравнений уровней (переменные состояния) и скоростей (переменные скорости). Уровни описывают состояние или условия внутри системы в данный момент времени; переменные скорости описывают, как изменяется это состояние за некоторый отрезок времени. Дополнительные уравнения обеспечивают обратную связь в системе моделирования. Языки MIMIC и CSMP непосредственно работают с уравнениями и выходят за рамки, накладываемые блочной конструкцией языка аналогового моделирования.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.