Схеми керування будь-яких механізмів, наприклад схема керування приводом головного руху верстата або схема керування вибором та заміною інструменту, як правило є цифровими автоматами, до складу яких входять схеми обох видів. Аналіз та синтез подібних схем складні, тому в інженерній практиці схему керування поділяють на кінцеві підсхеми, що описуються рівняннями алгебри логіки.
7.1 Синтез релейної схеми керування приводом головного руху через елементи алгебри логіки
У зв'язку з тим, що синтез схем электроавтоматики з використанням апарата алгебри логіки є універсальним засобом, придатним для будь-якої елементної бази, основні правила розглянемо як для безконтактних, так і для релейних схем.
Правила побудови релейних схем:
1) вихідне логічне рівняння перетвориться до виду И, ИЛИі мінімізується;
2) прямому значенню логічної перемінної в рівнянні відповідає контакт, що замикається, реле (нормально відкритий) у принциповій схемі;
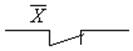
3) інверсному значенню логічної перемінної в рівнянні відповідає контакт, що розмикається, реле (нормально закритий);
4) логічному добутку перемінних відповідає послідовне з'єднання контактів;
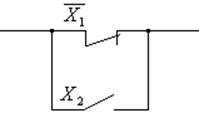
5) логічній сумі перемінних відповідає рівнобіжне з'єднання контактів.
Правила побудови безконтактних схем:
1) вихідне логічне рівняння необхідно привести до виду, що складає тільки з елементарних логічні операції, реалізованих елементами обраної проектувальником елементної бази і мінімізувати;
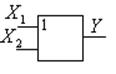
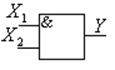
2) кожної елементарної логічної операції рівняння в принциповій схемі відповідає елемент, що реалізує цю операцію;
3) при багаторазової входимості в рівняння однієї елементарної логічної функції в іншу по логічній сумі, чи добутку інверсії накреслення схеми варто починати від останньої внутрішній входимості і закінчувати зовнішньої.
Побудуємо таблицю елементів релейно-контактних схем:
Таблиця 7.1 Елементів релейно-контактних схем.
|
Реалізована функція |
Елемент керування |
Релейний еквівалент |
|
Пряме значення логічної перемінний |
|
|
|
Інверсне значення логічної перемінний |
|
|
|
Логічний добуток перемінних |
|
|
|
Логічна сума перемінних |
|
|
Побудуємо таблицю елементів безконтактних схем:
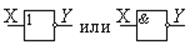
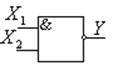
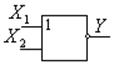
Таблиця 7.2 Елементів безконтактних схем.
|
Функція |
Елемент рівняння |
Еквівалент у безконтактній схемі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рівняння алгебри логіки описуючи релейну схему керування приводу головного руху буде виглядати так:
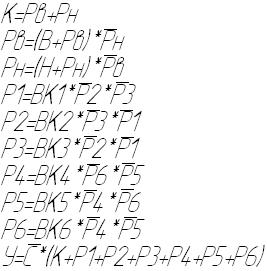
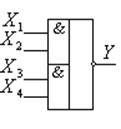
Для синтезу релейної схеми управління використовуємо логічні елементи серії ЛА 153, ЛА 154 та ЛА 155.
Синтез схеми керування приводом головного руху зображен на рис. 7.1
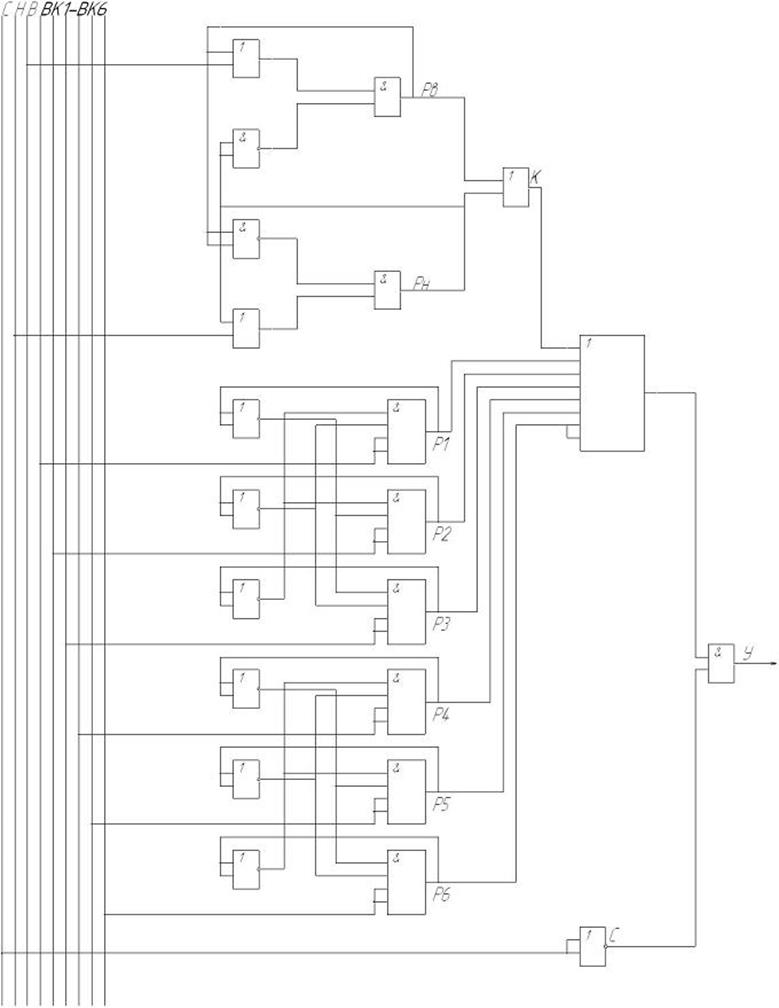 Рис.
7.1 Синтез релейної схеми управління ПГР
Рис.
7.1 Синтез релейної схеми управління ПГР
Зубофрезерні верстати характеризуються дією змінних зусиль різання при одночасному вимаганні точності обробки. Обробляємі зубчасті колеса, як видно, перевіряють за декількома параметрами і тому до деформації вузлів верстата слід пред’являти відповідні вимоги.
Процес нарізання довгий, і тому застосування високошвидкісних режимів обробки є необхідною умовою для підвищення продуктивності верстата. Разом з тим змінність сил різання у часі є джерелом вібрації, які можуть з’явитися у верстаті, особливо при швидкісних методах зубофрезерування. Тому компановка зубофрезерних верстатів повинна забезпечувати високу точність обробки при сприйнятті високих зусиль різання, завдяки жорсткості системи.
8.1 Цільові вузли та їх взаємозв’язок і призначення
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.