










МО РБ
Полоцкий государственный университет
Кафедра строительной
механики
Расчётно-графическая работа №1
по теме:
«Динамический расчет систем с конечным числом степеней свободы на вибрационную
нагрузку »
Выполнил: Матвейчев А.В.
гр. 06ПГС-5
Проверил: Турищев Л.С.
Новополоцк
2009
Вариант задания - 8
§1. Расчет на свободные колебания.
1) Описание физических свойств материала.
Материал балки сталь Ст.3.
Расчетное сопротивление R = 210МПа, модуль упругости Е = 2·105МПа.
Отношение
 .
.
2) Образование расчетной схемы.
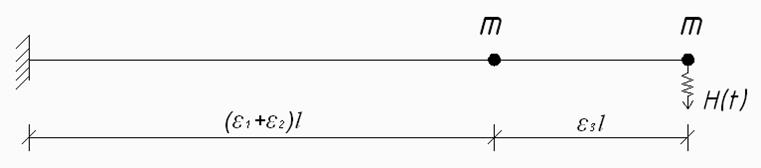
Рис.1. Расчетная схема
l = 3м;
m = 2700кг; H = 2,7кН.
ε1=1; ε2=0,8; ε3=0,5
 1.1. Изображение расчетной схемы безмассовой
стержневой системы в виде кинематической цепи.
1.1. Изображение расчетной схемы безмассовой
стержневой системы в виде кинематической цепи.
Рис.2. Изображение расчетной схемы в виде кинематической цепи
1.2. Подсчет числа степеней свободы безмассовой стержневой системы.
Д = 1, У = 0, Ш = 0, С = 0, Соп = 3.
W = 3Д + 2У – 2Ш – С – Соп = 3 – 3 = 0.
Вывод: система может быть геометрически неизменяемой и статически определимой.
1.3. Анализ геометрической структуры.
Диск Д1 крепится к земле при помощи 3-х стержней, не пересекающихся в одной точке и не параллельных между собой, и образует с ним единый неподвижный диск.
Вывод о статических и кинематических свойствах расчетной схемы безмассовой стержневой системы.
Вывод: система геометрически неизменяема и статически определима.
§2. Определение собственных частот и собственных форм свободных колебаний системы.
2.1.Определение числа степеней свобода деформируемой
стержневой системы.
1) Изображение отклоненного положения системы и независимых перемещений присоединенных к ней масс без учета допущений.
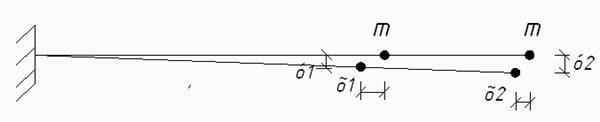
2) Определение полного числа степеней свободы.
![]()
3) Изображение отклоненного положения системы и независимых перемещений присоединенных к ней масс с учетом допущений.

4) Определение неполного числа степеней свободы.
![]()
2.2.Образуем основную систему обратного метода.
2.3. Составление в обратной форме дифференциальных уравнений движения с учетом допущений.
![]() ,
,
![]() .
.
2.4. Решаем систему дифференциальных уравнений свободных колебаний.
![]() ,
,
![]() ,
,
Подставляем данные выражения в систему уравнений
![]() ,
,
![]() .
.
Данное выражение представляет собой систему однородных линейных алгебраических уравнений.
Такая система может иметь 2 решения:
1) когда а1=0 либо а2=0
2) когда имеется бесконечное множество решений
Первый вариант нас не удовлетворяет, так как в данном случае система будет находиться в состоянии покоя, следовательно, будем решать систему исходя из того, что она имеет бесконечное множество решений. Для этого составляем определитель системы, который должен равняться нулю.
2.5. Для определения ![]() рассмотрим
основную систему обратного метода в двух единичных состояниях и построим единичные
эпюры.
рассмотрим
основную систему обратного метода в двух единичных состояниях и построим единичные
эпюры.
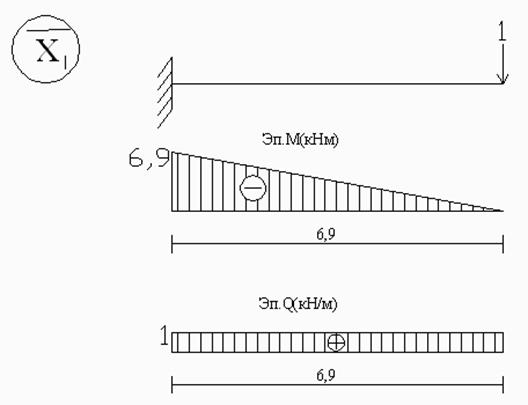
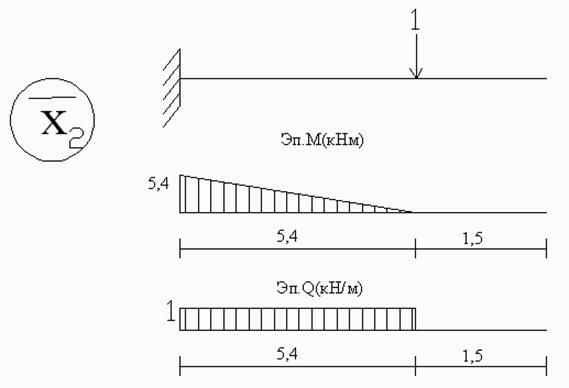
Теперь определяем  :
:
2.6. Подставляем найденные значения и масс в определитель. Преобразуем его,
раскроем и получим преобразованное частотное уравнение свободных колебаний.
Умножим каждый член на  и
получим:
и
получим:
Раскрываем определитель:
![]()
![]()
![]()
![]()
![]()
2.7. Подберём нужный номер двутавра исходя из условия статической прочности на изгиб.
Рис.3.
![]() кН
кН
2) Вычисление опорных реакций.
 3) Получение
аналитических выражений, описывающих изменение внутренних усилий по участкам.
3) Получение
аналитических выражений, описывающих изменение внутренних усилий по участкам.
Участок
СВ (0 ≤ х ≤ 1,5м): 
![]() кН,
кН,
![]() кН.
кН.
Участок
ВА (0 ≤ х ≤ 5,4м): 
![]() кН,
кН,
![]() кН.
кН.
4) Построение эпюр внутренних усилий.
 , (1)
, (1)
Откуда,
 .
.
R = 210МПа, Mmax = 40,5кН·м.
 см³.
см³.
По сортаменту выбираем поперечное сечение: двутавр №20а, Wz = 203cм³,
Iz = 2030cм4.
Находим круговые частоты:
так
как  , то
, то 
2.8. Строим спектр собственных круговых частот.

2.9. Строим собственные формы свободных колебаний
![]()
I
форма с ![]()
![]()
Пусть ![]() , тогда
, тогда 
II
форма с ![]()
![]()
Пусть ![]() , тогда
, тогда 
I Форма
IIФорма
2.10. Проверим свойство ортогональности : ![]()
![]()
Проверка выполняется.
2.11. Определение нормирующих множителей для I и II форм свободных колебаний.


Определим величину ортонормированных амплитуд для I и II форм свободных колебаний.
I форма:
II форма
Проверим правильность вычисления ортонормированных амплитуд:

§3 Динамический расчёт системы на действие вибрационной нагрузки.
![]()
![]()
3.1.Составляем систему дифференциальных уравнений вынужденных колебаний в обратной форме.
3.2. Решаем систему дифференциальных уравнений:
Подставляем данные выражения в систему уравнений и получаем :
3.3. Преобразуем систему амплитудных уравнений вынужденных колебаний в систему уравнений амплитудных значений сил инерции
3.4.Найдём
значение коэффициентов ![]()
3.4. Определим значения ![]() , для
этого основную систему обратного метода рассмотрим на действие амплитудного
значения возмущающей нагрузки и построим эпюру Мн
, для
этого основную систему обратного метода рассмотрим на действие амплитудного
значения возмущающей нагрузки и построим эпюру Мн
Определим ![]()
Решаем систему уравнений:
Умножим оба уравнения на (-EIz) и получим:
Строим эпюры ![]() и
и ![]() :
:
Построим эпюру динамических усилий от действия сил инерции:
![]()

Проверка выполнения условий предельных состояний для колеблющейся стержневой системы.
1)Проверка выполнения условий первой группы предельных состояний.

2)Проверка выполнения условий второй группы предельных состояний.
l/f=(5/48)×Мl2/EЈ≤1/200
l/f=(5/48) ×(5,02×103×52)/(2×1011×27440×0.014)=0,0023≤1/200=0,005
3)Заключение о возможности эксплуатации колеблющейся стержневой системы.
Данная колеблющаяся стержневая система пригодна к эксплуатации, т.к. проверки по предельным группам состояний выполняются.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.