3.15. Оценить возможность использования частот 10 Мгц и 10 ГГц для оперативного измерения скорости автомобиля от 18 до 180 км/ч. Измерение выполняется на расстоянии не более 150 м. Ширина диаграммы направленности антенны не должна превышать 20º.
3.16. В обзорном локаторе используются импульсное зондирование пространства и одноканальное измерение азимута, при котором угловая координата цели определяется положением максимума сигнала на выходе приемника. За счет импульсного облучения положение импульса максимальной амплитуды не соответствует истинному угловому положению цели, в связи с чем возникает ошибка измерения азимута. Найти максимальную и среднеквадратичную ошибку определения угловой координаты, обусловленную дискретностью облучения цели, если ширина диаграммы направленности антенны РЛС 1º, скорость обзора пространства 100 град./с, период зондирования 2 мс.
3.17. В обзорном локаторе антенна вращается со скоростью 90 град/с и имеет ширину ДН 1º. Дальность действия РЛС 150 км. За счет запаздывания сигнала, отраженного от цели, возникает ошибка определения азимута цели. Определить абсолютное значение ошибки измерения азимута при условии, что цель находится на максимальной дальности.
3.18. Самолет пролетает мимо РЛС по прямой
линии, при этом его минимальное удаление от РЛС h = 150 км (см.
рисунок). Путевая ско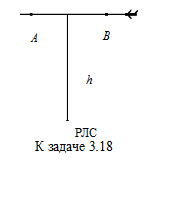 рость самолета 720 км/ч. РЛС излучает
монохроматический сигнал частотой f0 = 109 Гц.
Определить закон изменения частоты отраженного целью сигнала в приемнике РЛС на
временном промежутке Dt = 2 мин, соответствующем пребыванию
самолета на участке АВ. Запишите выражение принятого сигнала.
рость самолета 720 км/ч. РЛС излучает
монохроматический сигнал частотой f0 = 109 Гц.
Определить закон изменения частоты отраженного целью сигнала в приемнике РЛС на
временном промежутке Dt = 2 мин, соответствующем пребыванию
самолета на участке АВ. Запишите выражение принятого сигнала.
3.19. Радиолокационная станция, использующая ЛЧМ-сигнал, измеряет дальность цели, движущейся в сторону РЛС со скоростью 720 км/ч. Длительность импульса 15 мкс, девиация частоты 2 МГц, несущая частота 109 Гц. Какова будет ошибка измерения дальности за счет движения цели?
3.20. Радиолокационная станция излучает импульсный радиосигнал с прямоугольной огибающей длительностью 2 мкс на несущей частоте f0 = 1010 Гц в момент времени t = 0. Первая цель находится в этот момент на расстоянии R = 150 км и приближается к РЛС со скоростью 360 км/ч, а вторая – на расстоянии R = 180 км и удаляется с такой же скоростью. Записать выражение сигналов обеих целей на входе приемника.
3.21. Антенна импульсной РЛС выполняет круговой обзор пространства, вращаясь с угловой скоростью 30 град./c. Ширина главного луча ДНА 1º, частота излучения импульсов 1 кГц, несущая частота 109 Гц. Отсчет угловой координаты осуществляется от направления на север, с этого же направления начинается обзор. Угол, определяющий положение точечной цели, равен 90º. Записать выражение сигнала, принятого приемником РЛС.
3.22. Диаграмма направленности пеленгатора конического сканирования описывается в полярной системе координат выражением G(Q0) = G0 ехр{–p((Q–h)/Q0.5)2 }, Q0.5 = 1,5º. При какой величине углового смещения h обеспечивается максимальная пеленгационная чувствительность?
3.23. Напряжение на выходе пикового
детектора радиопеленгатора конического сканирования имеет вид U(t)
= U0 [1 + 0,1 cos(40pt –
– p/10)]. Каковы отклонения оси антенны
по азимуту и углу места от направления на цель, если ее ДН в полярных
координатах описывается выражением G(Q0) = G0 exp{–p(Q0 – 0,7![]() )2}?
)2}?
3.24. В ЧМ-дальномере непрерывный зондирующий сигнал имеет симметричный пилообразный закон модуляции частоты с параметрами: Тм = 1 мс, W = 10 МГц. Для дальности Rmax = 75 км изобразить закон изменения частоты биений во времени, определить среднюю частоту биений и относительную погрешность измерения дальности. Сделать вывод о целесообразности применения сигнала с такими параметрами.
3.25. В ЧМ-дальномере для движущейся цели минимальная измеряемая дальность определяется условием FRmin > FDmax. Объяснить причину этого ограничения. Определить минимальную дальность действия ЧМ дальномера, имеющего параметры: W = 9 МГц, Тм = 1 мс, l = 10 см. Максимальная скорость цели VRmax = 100 м/с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.